

















8 - 10
8. CALCULATION METHODS FOR DESIGNING
8.9 Precautions for zeroing
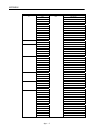
When a general positioning unit is used, the sequence of events is as shown in the following figure.
ON
Actuator signal
When determining the ON duration of the
actuator, consider the deceleration time so
that the speed reaches the creep speed.
Considering the variations of the
actuator signal, adjust the actuator
so that it switches off near the center
of the High of the zero pulse signal.
Z
ero pulse signal
Zeroing speed V
1
Deceleration started by actuator signal
Creep speed V
2
OFF
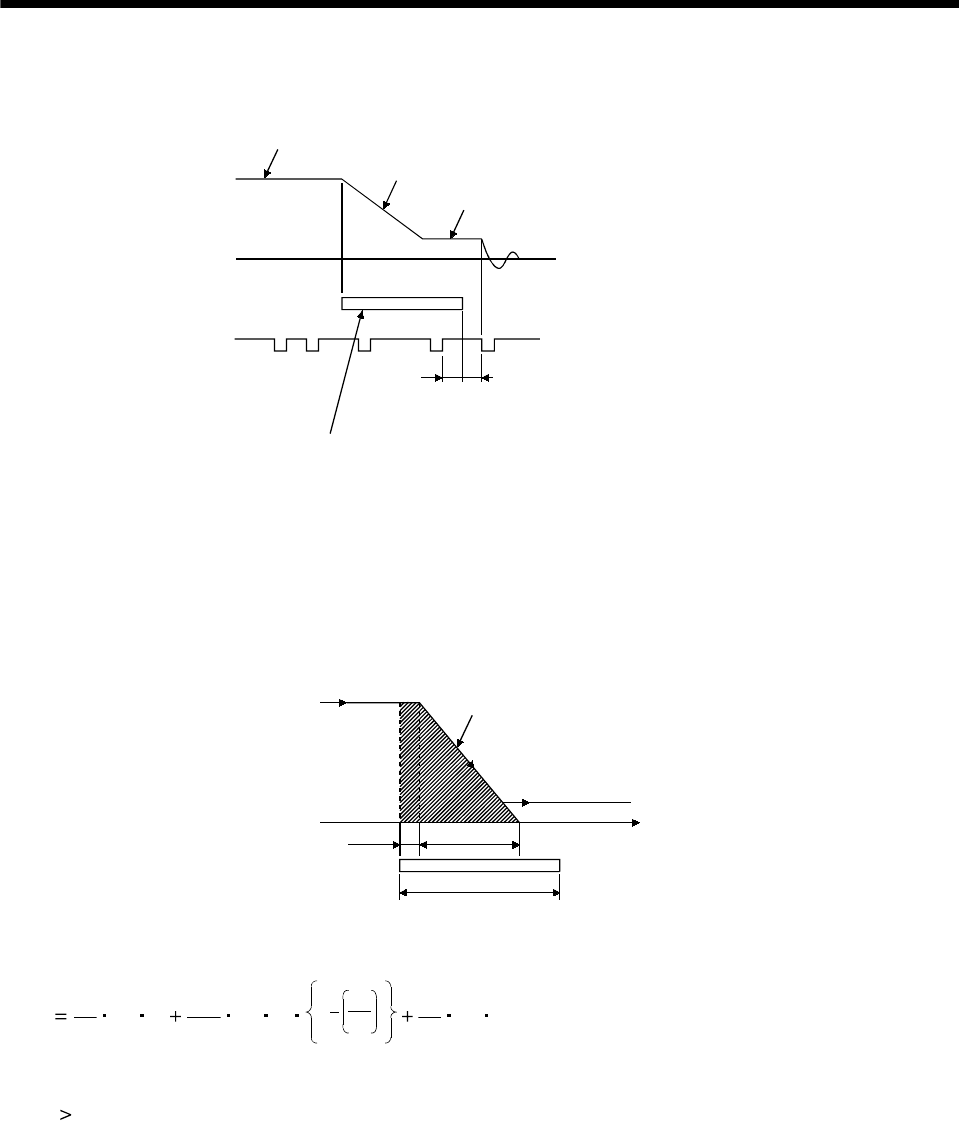
(1) When determining the ON duration of the actuator, consider the delay time of the control section and
the deceleration time so that the creep speed is attained. If the actuator signal switches off during
deceleration, precise home position return cannot be performed.
ON duration of the actuator L
D
Deceleration time t
d
Zeroing speed V
1
Travel distance gained after
detecting the zeroing dog until
the creep speed is reached L
1
Control delay
t
ime t
1
Creep speed V
2
Travel distance L1 in the chart can be obtained by Equation 8.28
L
1
1
60
V
1
t
1
1
120
V
1
t
d
1
V
1
V
2
2
1
60
V
1
T
p
........................................................................ (8.28)
ON duration of the actuator LD [mm] must be longer than L1 obtained by Equation 8.28, as indicated
in Equation 8.29
L
D
L
1
...................................................................................................................................................... (8.29)
where,
V
1,
V
2
: As shown in the chart [mm/min]
t
1,
t
d
: As shown in the chart [s]
L
1
: As shown in the chart [mm]
L
D
: As shown in the chart [mm]