



















3 - 33
3 POSITIONING DEDICATED SIGNALS
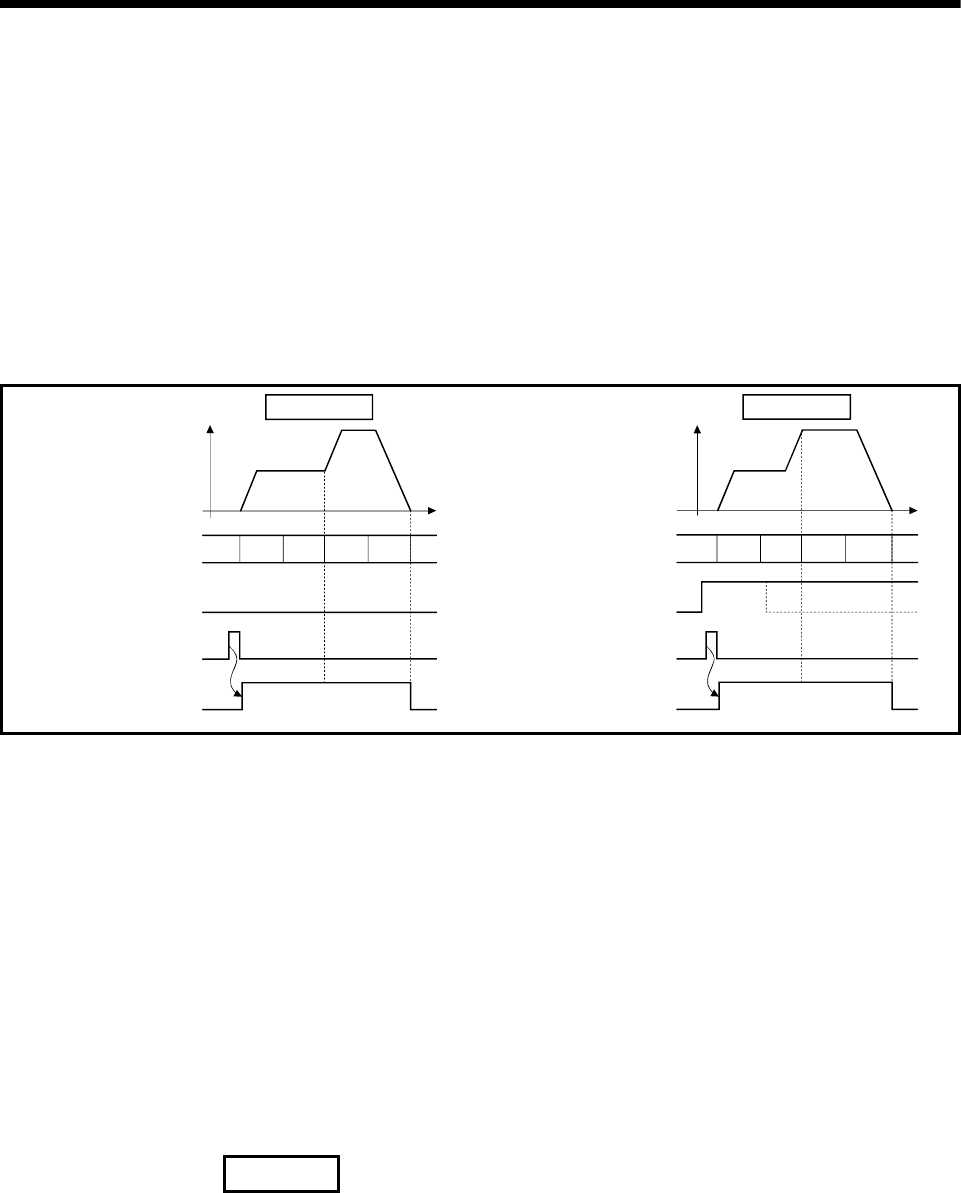
(6) Speed switching point specified flag (M2040) ...... Command signal
This flag is used when the speed change is specified at the pass point of the
constant speed control.
(a) By turning M2040 on before the starting of the constant speed control
(before the servo program is started), control with the change speed can be
executed from the first of pass point.
• OFF .......... Speed is changed to the specified speed from the pass point
of the constant speed control.
• ON .......... Speed has been changed to the specified speed at the pass
point of the constant speed control.
Pass points of the
constant speed control
(When the speed change
is specified with P3.)
Speed switching point
specified flag (M2040)
Servo program start
Start accept flag
(M2001+n)
OFF
ON
OFF
V
P1 P2 P3 P4
t
M2040 OFF
OFF
ON
V
P1 P2 P3 P4
t
M2040 ON
ON
OFF
Speed switching point
specified flag (M2040)
Servo program start
Start accept flag
(M2001+n)
Pass points of the
constant speed control
(When the speed change
is specified with P3.)
(7) System setting error flag (M2041)................................. Status signal
This flag set the "system setting data" and performs an adjustment check with a
real installation state (CPU base unit/extension base units) at the power supply
on or resetting of the Motion CPU.
• ON .......... Error
• OFF .......... Normal
(a) When an error occurs, the ERR. LED at the front of the CPU turns on.
The error contents can be confirmed using the error list monitor of a
peripheral device started by SW6RN-GSVP.
(b) When M2041 is on, positioning cannot be started. Remove an error factor,
and turn the power supply on again or reset the Multiple CPU system.
REMARK
Even if the module which is not set as the system setting with the peripheral device
is installed in the slot, it is not set as the object of an adjustment check. And, the
module which is not set as the system setting cannot be used in the Motion CPU.