



















6 - 45
6 POSITIONING CONTROL
(4) The setting range for the radius is 1 to (2
31
-1).
(5) The maximum arc radius is (2
32
-1).
2
31
-1
2
31
-1-2
31
Maximum arc
Arc central point
Radius R
0
Fig.6.14 Maximum arc
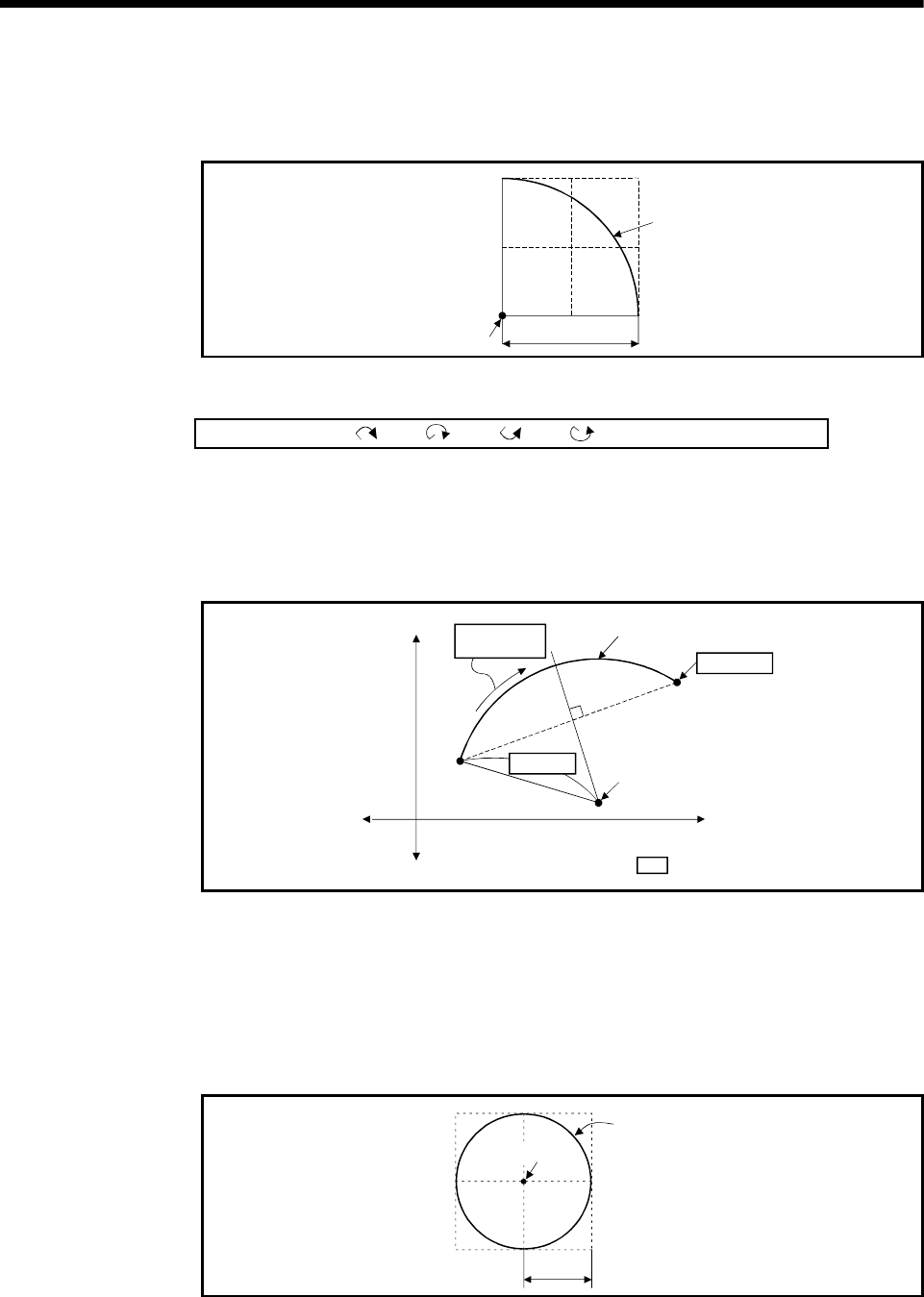
Control using INC
, INC , INC , INC (Incremental data method)
(1) Circular interpolation from the current stop address (0, 0) to the specified end
point with specified radius.
(2) The center of the arc is the point of intersection of the perpendicular bisectors of
the start point address (current stop address) to the end address.
Reverse
direction
0
Start point
Radius R
Arc central point
Circular interpolation path
End point
Positioning
speed
Forward direction
Reverse direction
Forward direction
: Indicates setting data (Note)
Fig.6.15 Circular interpolation control using incremental data method
(3) Setting range of end point address is (-2
31
)
to (2
31
-1).
(4) Setting range of radius is 1
to (2
31
-1).
(5) Maximum arc radius is (2
31
-1).
Maximum arc
2
31
-1-2
31
2
31
-1
0
Radius R
Arc central point
Fig.6.16 Maximum arc