



















6 -
229
6 POSITIONING CONTROL
6.23.16 Servo program for home position return
The home position return executed using the ZERO servo instruction.
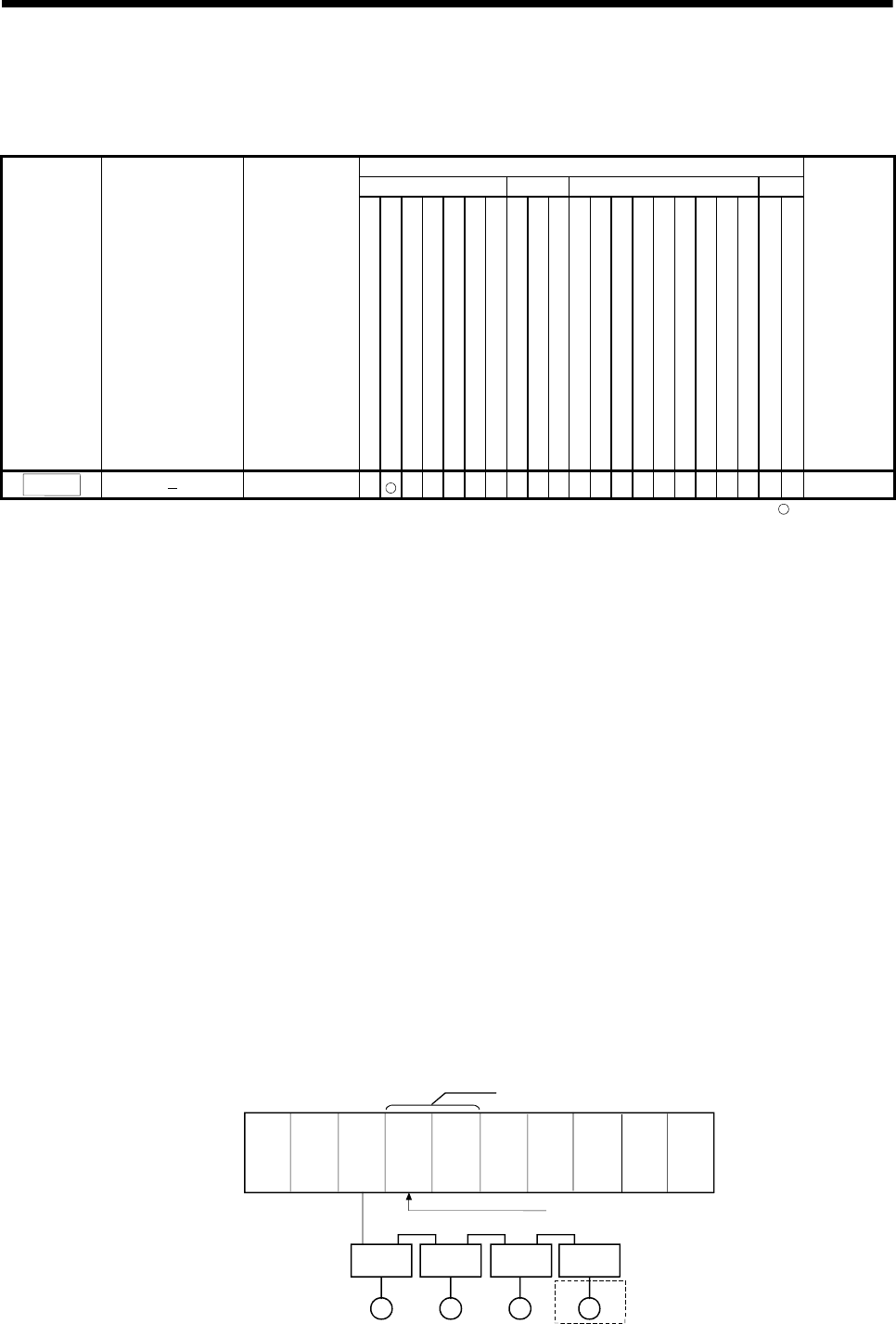
Items set by peripheral devices
Common Arc Parameter block Others
Servo instruction Positioning method
Number of
controllable axes
Parameter block No.
Axis
Address/travel value
Command s
p
eed
Dwell time
M-code
Tor
q
ue limit value
Auxiliar
y
p
oint
Radius
Central
p
oint
Control unit
S
p
eed limit value
Acceleration time
Deceleration time
Ra
p
id sto
p
deceleration time
Tor
q
ue limit value
Deceleration
p
rocessin
g
on sto
p
in
p
ut
Allowable error ran
g
e for circular inter
p
olation
S-curve ratio
Others
Program No.
Speed change
ZERO
1
: Must be set
[Control details]
(1) Home position return is executed by the home position return method specified
with the home position return data (Refer to Section 6.23.1).
Refer to the following sections for details of the home position return methods :
• Proximity dog type 1................... Section 6.23.2
• Proximity dog type 2................... Section 6.23.3
• Count type 1............................... Section 6.23.4
• Count type 2............................... Section 6.23.5
• Count type 3............................... Section 6.23.6
• Data set type 1............................ Section 6.23.7
• Data set type 2............................ Section 6.23.8
• Dog cradle type........................... Section 6.23.9
• Stopper type 1............................ Section 6.23.10
• Stopper type 2............................ Section 6.23.11
• Limit switch combined type........ Section 6.23.12
[Program]
Servo program No. 0 for home position return is shown as the following conditions.
(1) System configuration
Home position return of Axis 4.
Home position return command (PX000)
MM MM
Axis
4
Axis
1
Axis
2
Axis
3
AMP AMP AMP AMP
Motion CPU control module
Q61P Q02H
CPU
Q172H
CPU
Q172
LX
QX41