


















4 - 12
4 PARAMETERS FOR POSITIONING CONTROL
POINTS
The data set in the parameter block is used in the positioning control, home position return
and JOG operation.
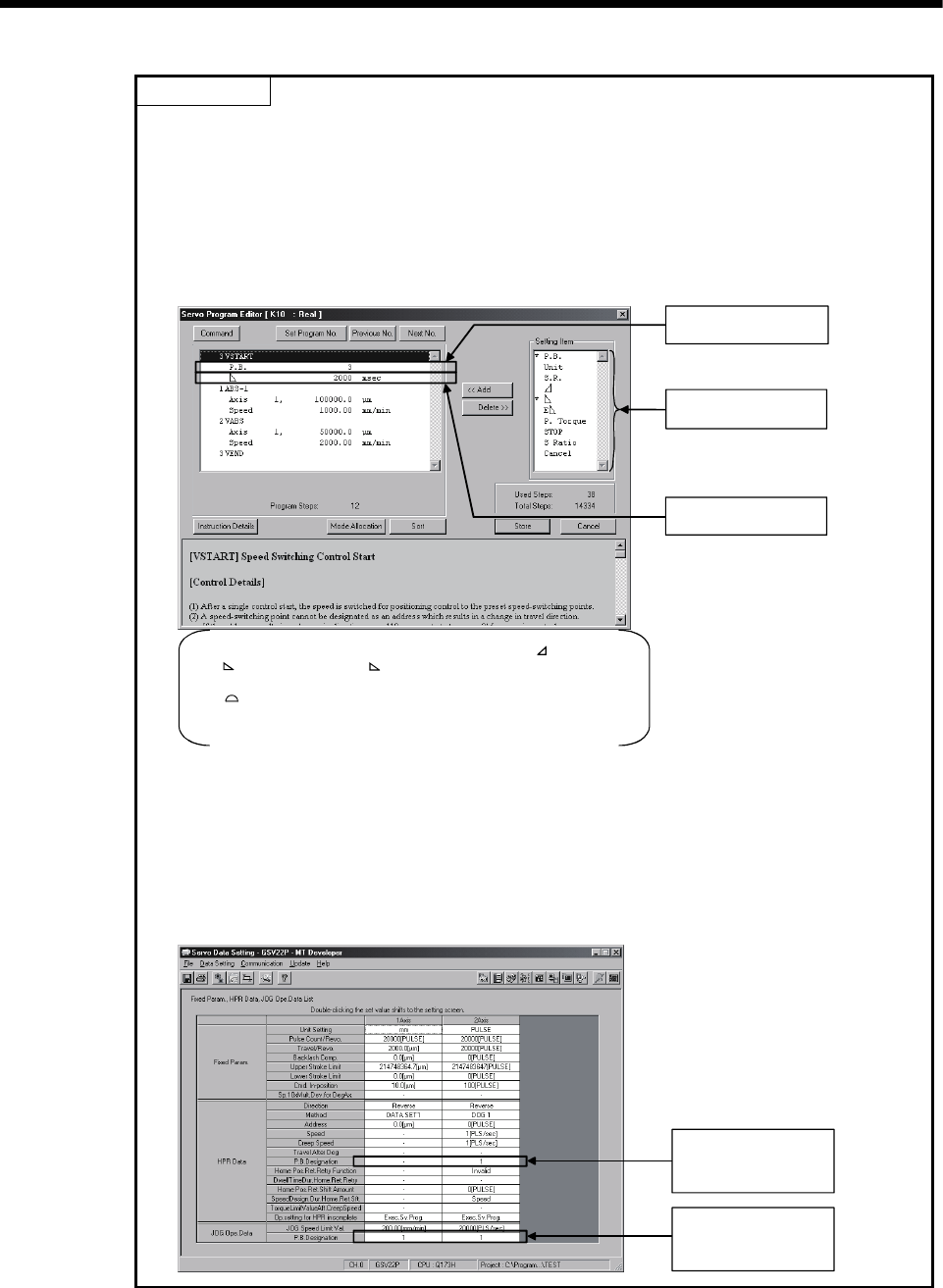
(1) The parameter block No. used in the positioning control is set using a peripheral device
at the creating of the servo program. If it is not set, control is executed with the contents
of parameter block No.1.
Also, it is possible to set parameter block data individually in the servo program.
[Servo program creation screen]
Individual parameter
block data setting
Parameter block
setting
Parameter block No.
setting
UNIT : Interpolation control unit, S.R. : Speed limit value, : Acceleration
time, : Deceleration time, E : Rapid stop deceleration time,
P.TORQ : Torque limit value, STOP : Deceleration processing on STOP
input, : Allowable error range for circular interpolation, SPEED : Change
speed when constant-speed control is executed, S RATIO : S-curve ratio
when S-pattern processing is executed
(2) The parameter block No. used in the home position return or JOG operation is set at
the setting of the "home position return data" or "JOG operation data" using a
peripheral device.
Refer to Section "6.23.1 Home position return data" or "6.21.1 JOG operation data" for
details.
[Home position return data setting screen]
Parameter block No.
setting of the home
position return
Parameter block No.
setting of the JOG
operation