



















4 - 11
4 PARAMETERS FOR POSITIONING CONTROL
4.3 Parameter Block
(1) The parameter blocks serve to make setting changes easy by allowing data such
as the acceleration/deceleration control to be set for each positioning processing.
(2) A maximum 64 blocks can be set as parameter blocks.
(3) Parameter blocks can be set using a peripheral device.
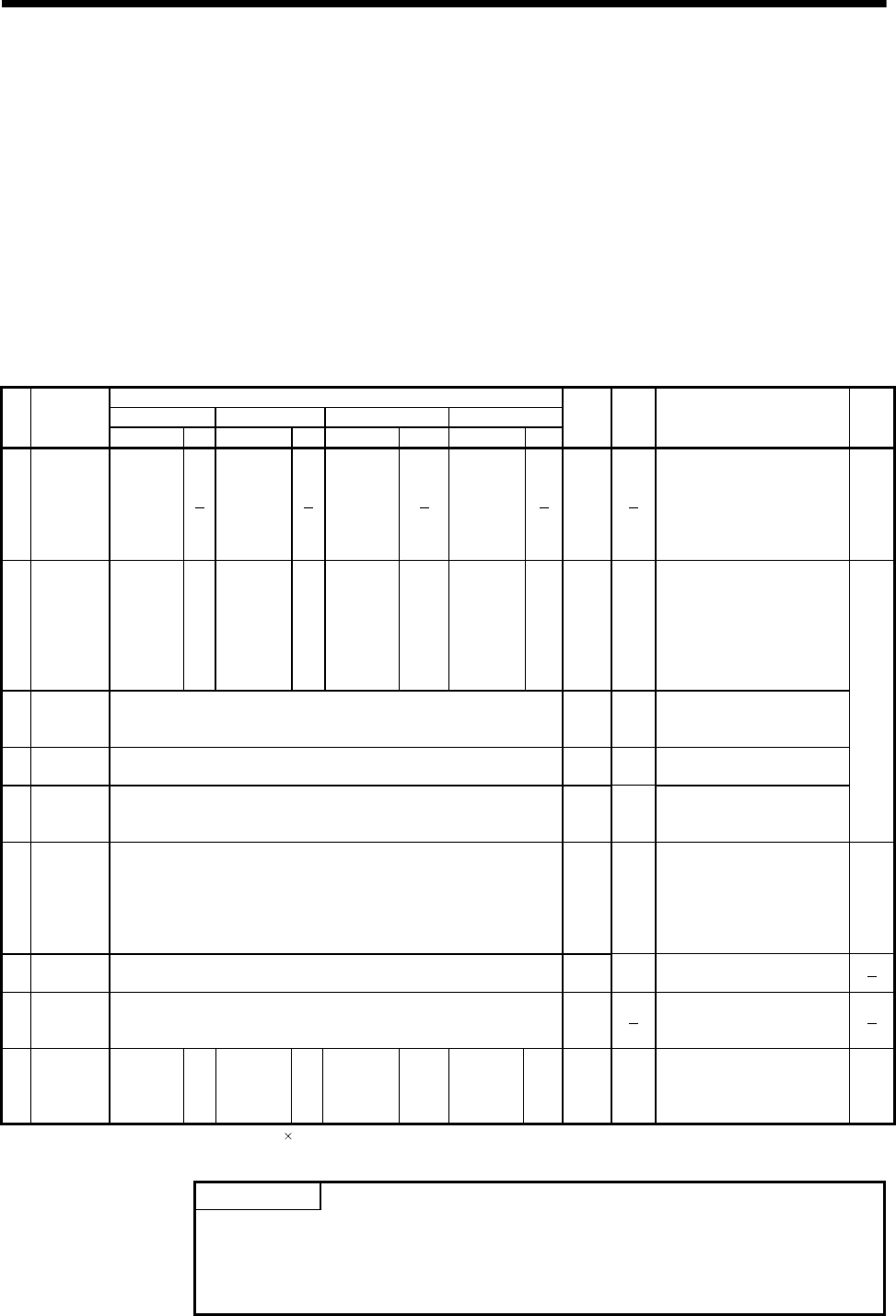
(4) Parameter block to be set are shown in Table 4.2.
Table 4.2 Parameter Block Setting List
Setting range
mm inch degree PLS
No. Item
Setting range Units Setting range Units Setting range Units Setting range Units
Initial
value
Units Remarks Section
1
Interpolation
control unit
0
1
2
3
3
• Set the units for compensation
control.
• It can be also used as the units for
the command speed and allowable
error range for circular interpolation
set in the servo program.
6.1.4
2
Speed limit
value
0.01 to
6000000.00
mm/
min
0.001 to
600000.000
inch/
min
0.001 to
2147483.647
(Note-1)
degree/
min
1 to
2147483647
PLS/s 200000 PLS/s
• Set the maximum speed for
positioning/home position return.
• If the positioning speed or home
position return speed setting
exceeds the speed limit value,
control is executed at the speed
limit value.
3
Acceleration
time
1 to 65535[ms] 1000
ms
• Set the time taken to reach the
speed limit value from the start of
motion.
4
Deceleration
time
1 to 65535[ms] 1000 ms
• Set the time taken to stop from
the speed limit value.
5
Rapid stop
deceleration
time
1 to 65535[ms] 1000 ms
• Set the time taken to stop from
the speed limit value when a rapid
stop is executed.
4.3.1
6 S-curve ratio 0 to 100[%] 0 %
• Set the S-curve ratio for S-pattern
processing.
• When the S-curve ratio is 0[%],
trapezoidal
acceleration/deceleration
processing is executed.
4.3.2
7
Torque limit
value
1 to 1000[%] 300 %
• Set the torque limit value in the
servo program.
8
Deceleration
processing on
STOP input
0 : Deceleration stop is executed based on the deceleration time.
1 : Deceleration stop is executed based on the rapid stop deceleration time.
0
• Set the deceleration processing
when external signals (STOP, FLS,
RLS) are input.
9
Allowable
error range
for circular
interpolation
0 to 10000.0
µm
0 to 1.00000 inch 0 to 1.00000 degree 0 to 100000 PLS 100 PLS
• Set the permissible range for the
locus of the arc and the set end
point coordinates.
4.3.3
(Note-1): When the "speed control 10 multiplier setting for degree axis" is set to "valid", the setting range is 0.01 to 21474836.47[degree/min].
However, setting range of 0.001 to 2147483.647[degree/min] is displayed in the parameter block setting screen of programming software.
POINTS
(1) Parameter blocks are specified in the home position return data, JOG operation
data or servo program.
(2) The various parameter block data can be changed using the servo program.
(Refer to Section 5.3.)