



















6 - 1
6 POSITIONING CONTROL
6. POSITIONING CONTROL
This section describes the positioning control methods.
6.1 Basics of Positioning Control
This section describes the common items for positioning control, which is described in
detail after Section 6.2.
6.1.1 Positioning speed
The positioning speed is set using the servo program.
Refer to Chapter 5 for details of the servo programs.
The real positioning speed is set in the positioning speed and speed limit value using
the servo program is shown below:
• If the positioning speed setting is less than speed limit value, the positioning is
executed with the setting positioning speed.
• If the positioning speed setting is less than speed limit value, the positioning is
executed with the positioning speed.
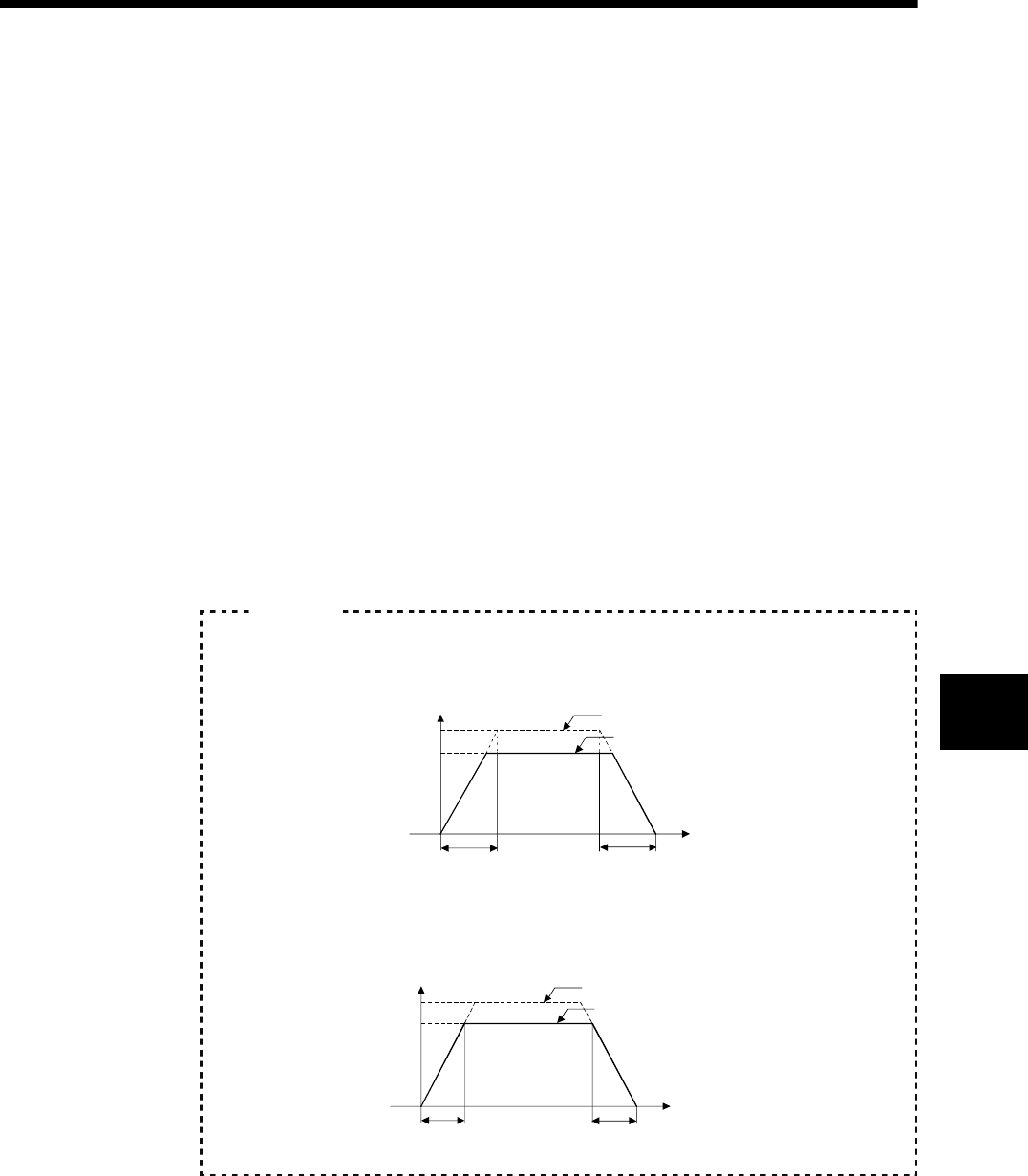
(1) If the speed limit value is 120000[mm/min] and the positioning speed setting is
100000[mm/min], the positioning speed is as follows.
120000
100000
Speed limit value
Positioning speed
Acceleration time of
parameter block
Deceleration time of
parameter block
V
t
(2) If the speed limit value is 100000[mm/min] and the positioning speed setting is
120000[mm/min], the positioning speed is as follows.
120000
100000
Speed limit value
(Real positioning speed)
Positioning speed
V
t
Acceleration time of
parameter block
Deceleration time of
parameter block
Examples
6