



















APP - 14
A
PPENDICES
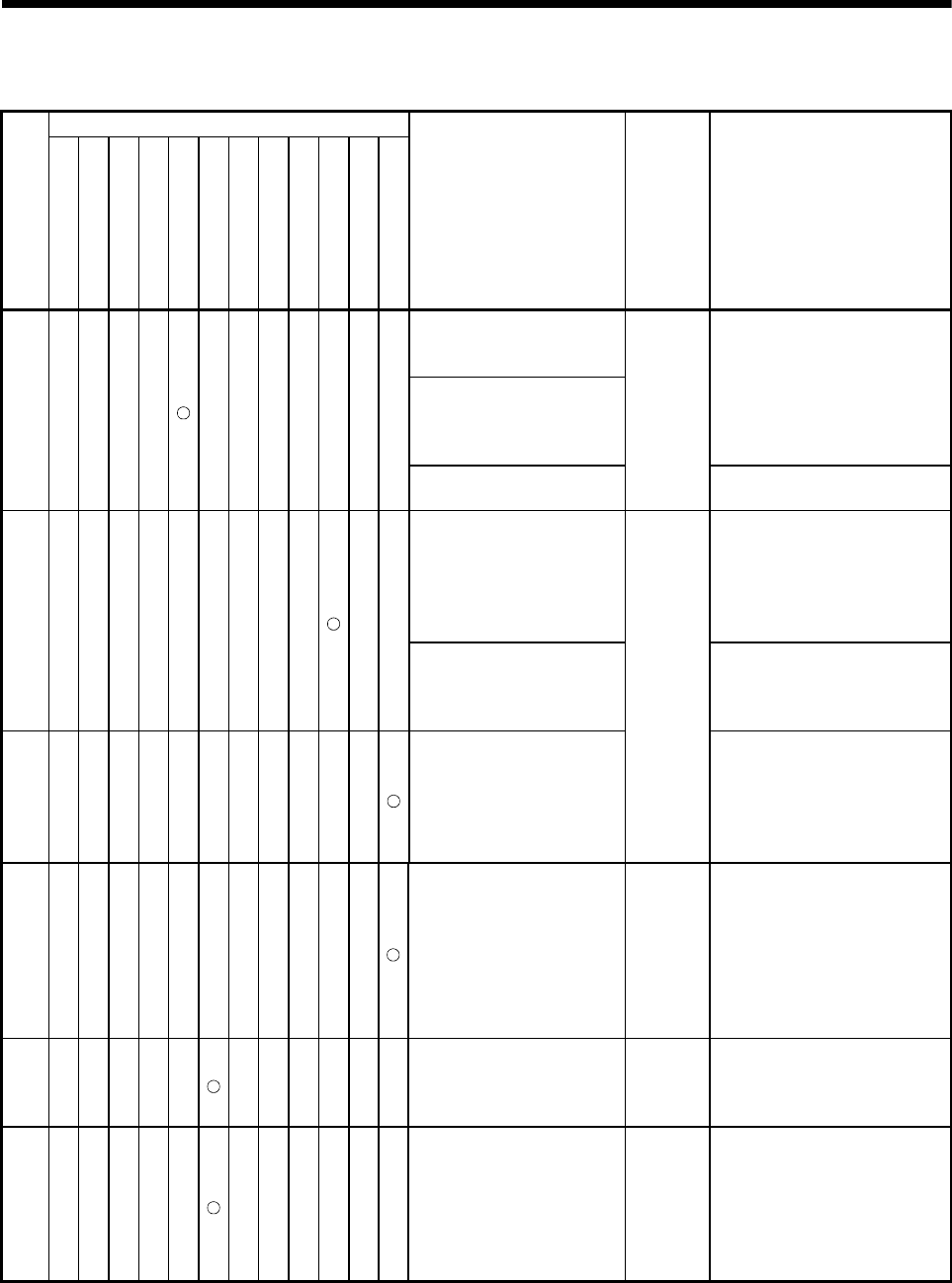
Table 1.5 Positioning control error (200 to 299) list (Continued)
Control mode
Error
code
Positioning
Fixed-pitch feed
Speed
Speed/position switching
Speed switching
Constant-speed
JOG
Manual pulse generator
Home position return
Position follow-up control
OSC
Speed control with
fixed position stop
Error cause
Error
processing
Corrective action
• The speed switching point
address exceed the end
point address.
• The positioning address in
the reverse direction was
set during the speed
switching control.
• Set the speed-switching point
between the previous speed
switching point address and the
end point address.
215
• The same servo program
was executed again.
Rapid stop
• Correct the Motion SFC
program.
• When the control unit is
"degrees" during the position
follow-up control, the
command address
exceeded the range of 0 to
35999999.
• When the control unit is
"degree", set the command
address within the range of 0 to
35999999.
220
• The command address for
the position follow-up
control exceeded the stroke
limit range.
• Set the address within the
stroke limit range.
221
• During the speed control
with fixed position stop, the
setting address exceeded
the range of 0 to 35999999
at the fixed position stop
command device ON.
Decelera-
tion stop
(M2001+n
OFF)
• Set the command address
within the range of 0 to
35999999.
222
• During the speed control
with fixed position stop, the
fixed position
acceleration/deceleration
time is "0" at the fixed
position
acceleration/deceleration
time input.
Control
with the
default
value
"1000".
• Set the acceleration/deceleration
time within the range of 1 to
65535.
225
• The speed at the pass point
exceeded the speed limit
value during the constant-
speed control.
Control
with the
speed limit
value.
• Set the speed command value
within the range of 1 to speed
limit value.
230
• When the skip is executed in
the constant-speed control,
the next interpolation
instruction is an absolute
circular interpolation or
absolute helical
interpolation.
Immediate
stop
• Execute the absolute linear
interpolation after a point which
make a skip.