


















6 -
190
6 POSITIONING CONTROL
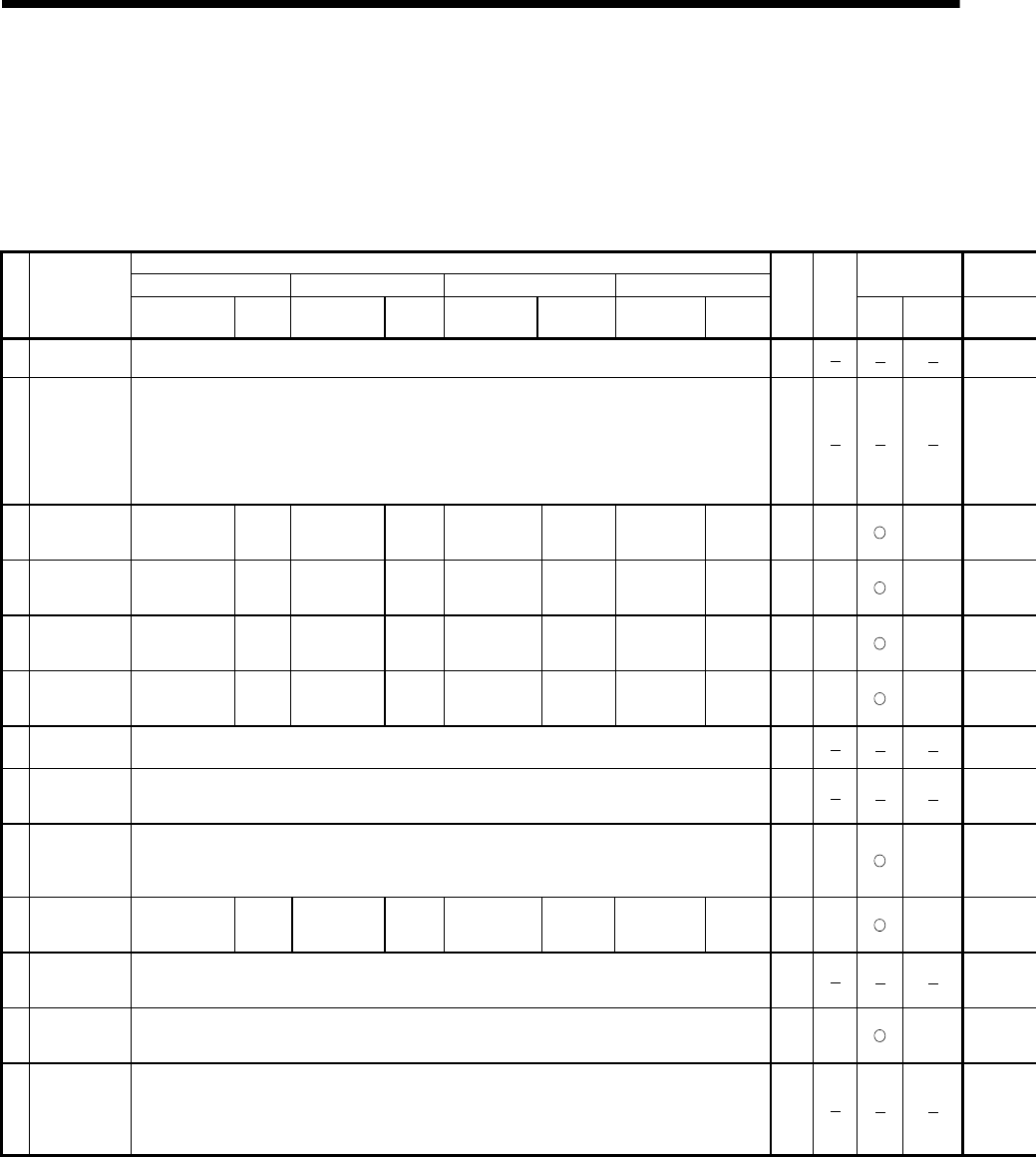
6.23.1 Home position return data
This data is used to execute the home position return.
Set this data using a peripheral device.
Table 6.3 Home position return data list
Setting range
mm inch degree PLS
Indirect setting
No. Item
Setting range Units Setting range Units Setting range Units Setting range
Units
Initial
value
Units
Valid/
invalid
Number
of words
1
Home position
return direction
0: Reverse direction (Address decrease direction)
1: Forward direction (Address increase direction)
0
2
Home position
return method
0: Proximity dog type 1
4: Proximity dog type 2
1: Count type 1
5: Count type 2
6: Count type 3
2: Data set type 1
3: Data set type 2
7: Dog cradle type
8: Stopper type 1
9: Stopper type 2
10: Limit switch combined type
0
3
Home position
address
-214748364.8
to
214748364.7
µ
m
-21474.83648
to
21474.83647
inch
0 to
359.99999
degree
-2147483648
to
2147483647
PLS
0 PLS
2
4
Home position
return speed
0.01 to
6000000.00
mm/min
0.001 to
600000.000
inch/min
0.001 to
2147483.647
(Note-1)
degree/min
1 to
10000000
PLS/s
1 PLS/s
2
5 Creep speed
0.01 to
6000000.00
mm/min
0.001 to
600000.000
inch/min
0.001 to
2147483.647
(Note-1)
degree/min
1 to
10000000
PLS/s
1 PLS/s
2
6
Travel value
after proximity
dog ON
0.0 to
214748364.7
µm
0.00000
to
21474.83647
inch
0.00000 to
21474.83647
degree
0 to
2147483647
PLS
0 PLS
2
7
Parameter
Block setting
1 to 64 1
8
Home position
return retry
function
0: Invalid (Do not execute the home position return retry by limit switch.)
1: Valid (Execute the home position return retry by limit switch.)
0
9
Dwell time at
the home
position return
retry
0 to 5000 [ms] 0 ms
1
10
Home position
shift amount
-214748364.8
to
214748364.7
µm
-21474.83648
to
21474.83647
inch
-21474.83648
to
21474.83647
degree
-2147483648
to
2147483647
PLS
0 PLS
2
11
Speed set at
the home
position shift
0: Home position return speed
1: Creep speed
0
12
Torque limit
value at the
creep speed
1 to 1000 [%] 300 %
1
13
Operation
setting for
incompletion
of home
position return
0: Execute a servo program
1: Not execute a servo program
1