










5 - 14
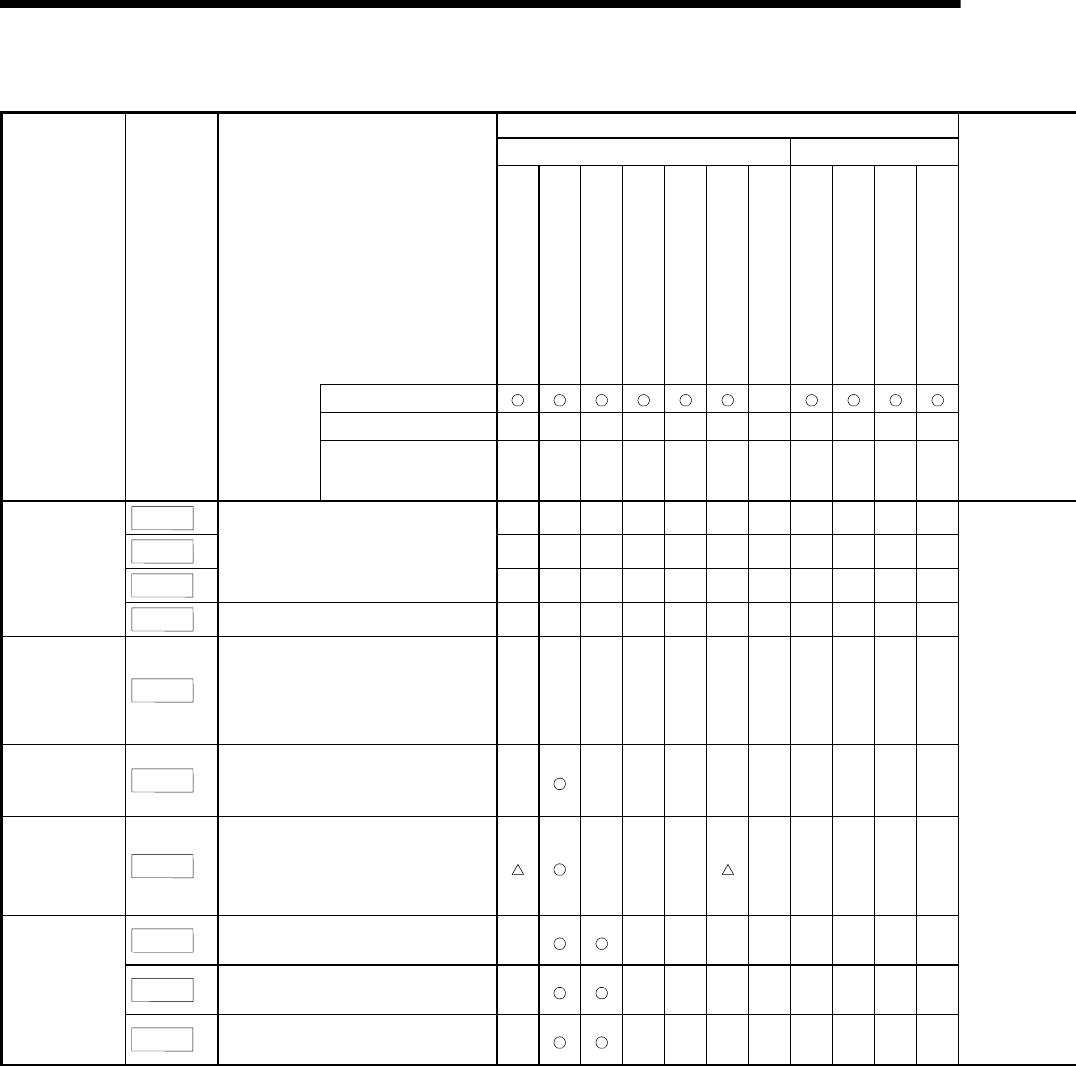
5 SERVO PROGRAMS FOR POSITIONING CONTROL
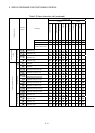
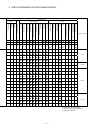
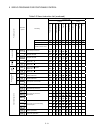
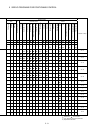
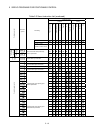
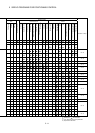
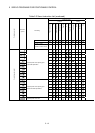
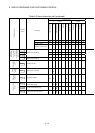
Table 5.2 Servo Instruction List (continued)
Positioning data
Common Circular
Instruction
symbol
Processing
Parameter block No.
Axis
Address/travel value
Command speed
Dwell time
M-code
Torque limit value
Auxiliary point
Radius
Central point
Pitch
Virtual enable
—
Number of steps
1 1 1 1 1 1 1 1 1 1 1
Positioning control
Number of indirect words
1 — 2 2 1 1 1 2 2 2 1
FOR-TIMES
FOR-ON
FOR-OFF
Repeat range start setting
Repetition of
same control
(used in speed
switching
control, constant-
speed control)
NEXT
Repeat range end setting
Simultaneous
start
START
Simultaneous start
Home
position
return
ZERO
Home position return start
High speed
oscillation
OSC
High-speed oscillation
CHGA
Servomotor/Virtual Servomotor Shaft
Current Value Change
CHGA-E
Encoder current value change
Current Value
change
CHGA-C
CAM shaft current value change