
















3 - 14
3 POSITIONING DEDICATED SIGNALS
(b) An in-position check is performed in the following cases.
• When the servo power supply is turned on.
• After the automatic deceleration is started during positioning control.
• After the deceleration is started with the JOG start signal OFF.
• During the manual pulse generator operation.
• After the proximity dog ON during a home position return.
• After the deceleration is started with the stop command.
• When the speed change to a speed "0" is executed.
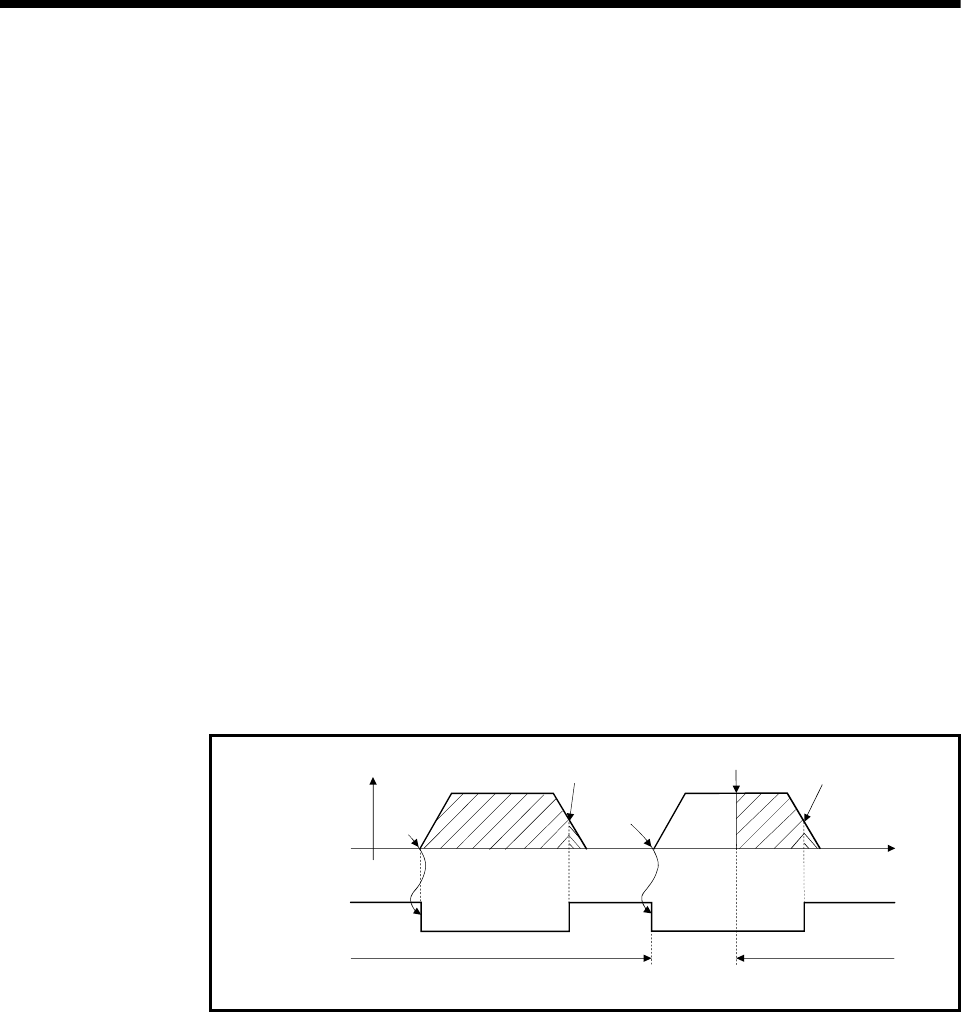
(4) Command in-position signal (M2403+20n) .................Status signal
(a) This signal turns on when the absolute value of difference between the
command position and feed current value becomes below the "command
in-position range" set in the fixed parameters.
This signal turns off in the following cases.
• Positioning control start
• Home position return
• Speed control
• JOG operation
• Manual pulse generator operation
(b) Command in-position check is continually executed during position control.
This check is not executed during speed control or speed control in the
speed/position switching control.
(c)
(5) Speed controlling signal (M2404+20n) ........................Status signal
(a) This signal turns on during speed control, and it is used as judgement of
during the speed control or position control.
It is turning on while the switching from speed control to position control by
the external CHANGE signal at the speed/position switching control.
Command in-position
(M2403+20n)
Position
control
start
Command in-position setting
Speed/position
control start
Switch from speed to position
Command in-position
setting
Execution of command in-position check
Execution of command
in-
p
osition check
ON
OFF
t
V