



















6 -
209
6 POSITIONING CONTROL
6.23.8 Home position return by the data set type 2
(1) Data set type 2
The proximity dog is not used in this method for the absolute position system.
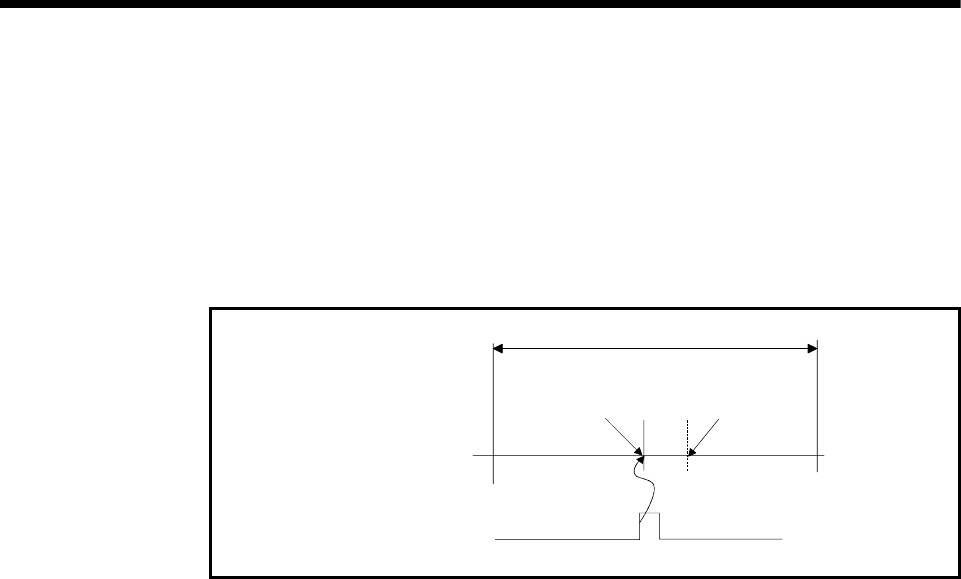
(2) Home position return by the data set type 2
Home position is the real position of servomotor at the home position return
operation.
Machine travel range
Real position of
machine at the home
position return start
Command position
at the home position
return start
Home position is the
real position at the
home position return
Home position return
by servo program
start instruction
Fig. 6.39 Home position return operation by the date set type 2
(3) Home position return execution
Home position return by the data set type 2 is executed using the servo program
in Section 6.23.16.
(4) Cautions
(a) A zero point must be passed (zero pass signal: M2406+20n ON) between
turning on the power supply and executing home position return.
If home position return is executed without passing a zero point once, "no
zero point passed error" occurs. If "no zero point passed error" occurred,
perform the home position return again, after reset the error and turn the
servomotor at least one revolution by the JOG operation.
The zero point passing can be confirmed with the zero pass signal
(M2406+20n). However, when "1 : Not need to pass motor Z phase after the
power supply is switched on" is selected in the "function selection C-4" of
servo parameter (expansion setting parameter), even if it does not pass zero
point at the servo amplifier power ON, the home position return is possible
because the zero pass signal (M2406+20n) turns ON.
(b) The home position return data required for the data set type 2 are the home
position return direction and home position address.