



















6 -
174
6 POSITIONING CONTROL
6.21.2 Individual start
JOG operation for the specified axes is started.
JOG operation is executed by the following JOG operation commands:
• Forward JOG start command ........... M3202+20n
• Reverse JOG start command ........... M3203+20n
[Control details]
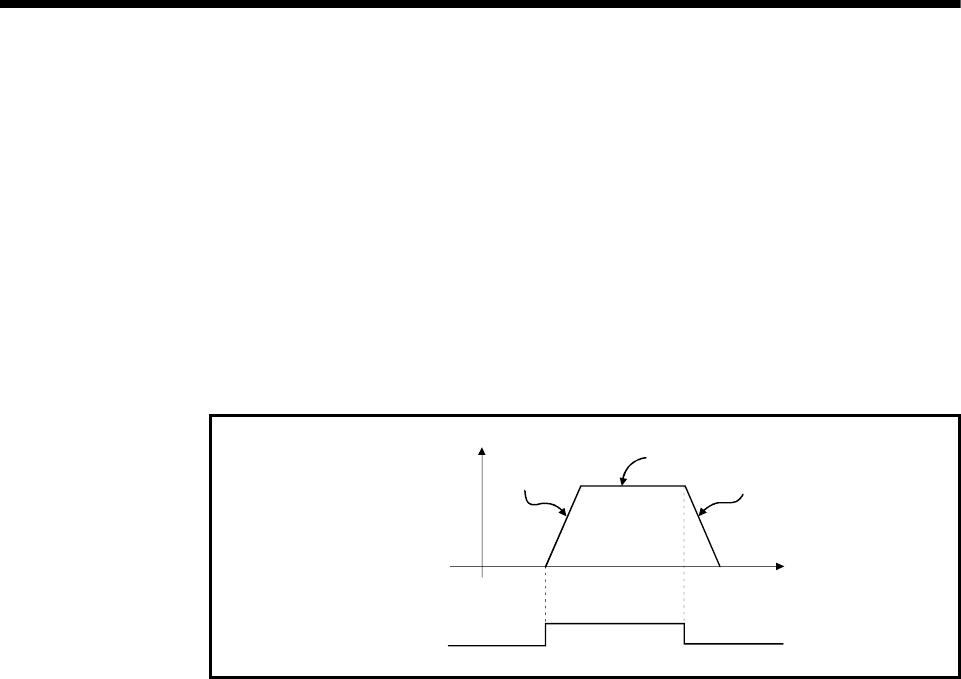
(1) JOG operation continues at the JOG speed setting register value while the JOG
operation command turns on, and a deceleration stop is made by the JOG
operation command OFF.
Control of acceleration/deceleration is based on the data set in JOG operation
data.
Deceleration stop based
on JOG operation data
JOG operation speed
Acceleration based
on JOG operation
data
V
t
ON
OFF
JOG operation command
(M3202+20n/M3203+20n)
JOG operation for axis for which JOG operation command is turning on is
executed.