



















6 -
165
6 POSITIONING CONTROL
6.19 Speed control with fixed position stop
Speed control with fixed position stop of the specified axis is executed.
Speed control with fixed position stop is started using the PVF (forward rotation) or
PVR (reverse rotation) of servo program instruction.
Items are set in peripheral devices
Common Arc Parameter block Others
Servo
instruction
Positioning
method
Number of
control axes
Parameter block No.
Axis
Address/travel value
Command s
p
eed
Dwell time
M-code
Tor
q
ue limit value
Auxiliar
y
p
oint
Radius
Central
p
oint
Control unit
S
p
eed limit value
Acceleration time
Deceleration time
Ra
p
id sto
p
deceleration time
Tor
q
ue limit value
Deceleration
p
rocessin
g
on sto
p
in
p
ut
Allowable error ran
g
e for circular inter
p
olation
S-cur
v
e ratio
Cancel
WAIT-ON/OFF
Fixed position stop accel./decel.time
Fixed
p
osition sto
p
Speed
change
PVF
Absolute 1
Valid
PVR
Absolute 1
Valid
: Must be set
: Set if required
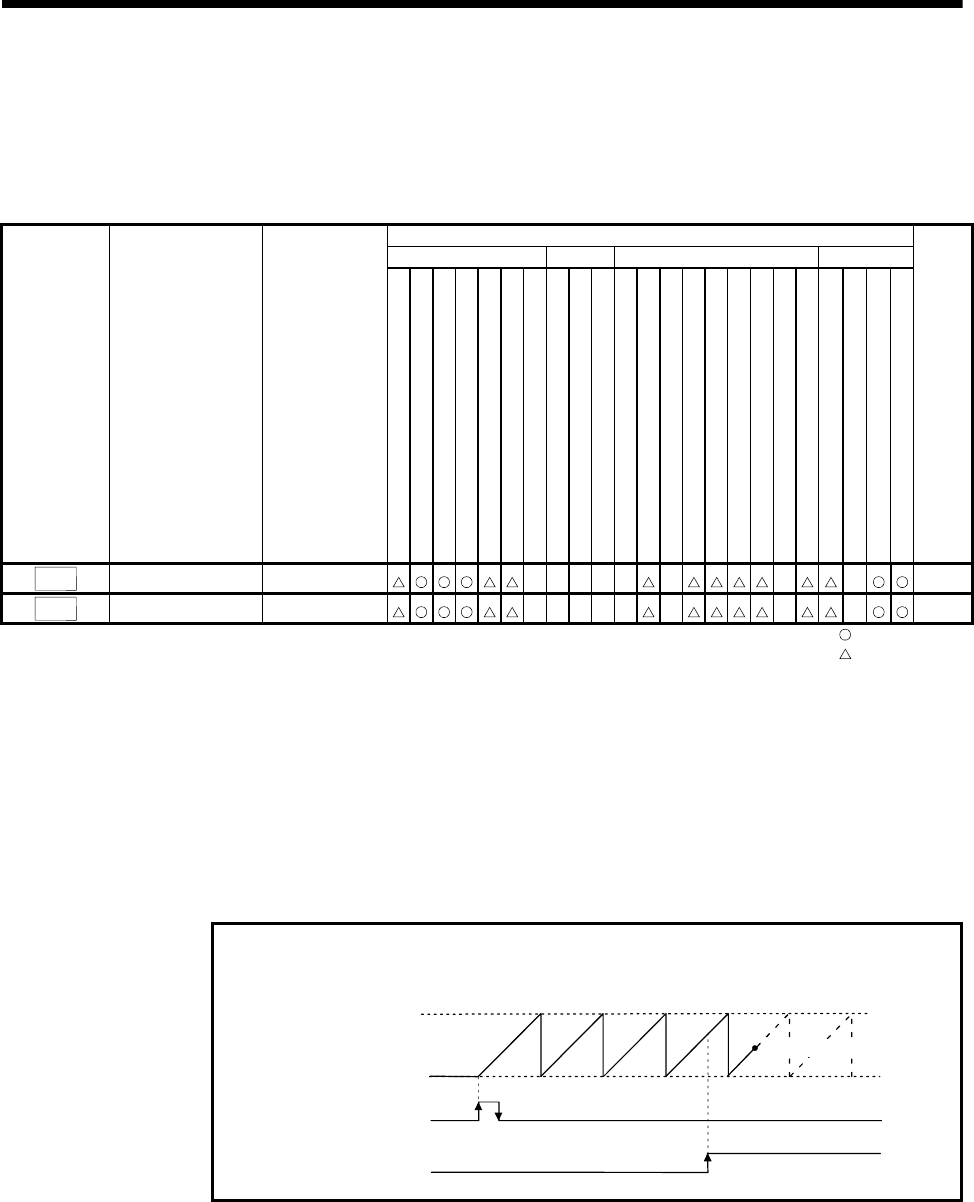
[Control details]
(1) After starting of servomotor, control at the specified speed is executed until the
fixed position stop command turns on.
• PVF...... Forward rotation direction (Address increase direction) start
• PVR...... Reverse rotation direction (Address decrease direction) start
(2) When the fixed position stop command turns on, a positioning control to the
specified address is executed.
359.99999[degree]
0[degree]
Current value
Servo program
start
[Positioning address :180.00000[degree]]
OFF
ON
180.00000[degree]
ON
OFF
Fixed position stop
command device
(3) It can be controlled in the real mode only for axis which "control unit is [degree]
and stroke limit is invalid ("upper stroke limit value" equal to "lower stroke limit
value")". If it is started for axis which "control unit is except [degree] or stroke limit
is not invalid", a minor error [130] occurs and it does not start.
And, if it is started for the virtual servomotor axis in the virtual mode, a servo
program setting error [905] occurs and it does not start. (It can be started for real
mode axis.)