
















5 - 20
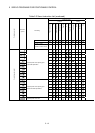
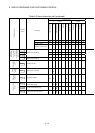
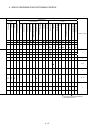
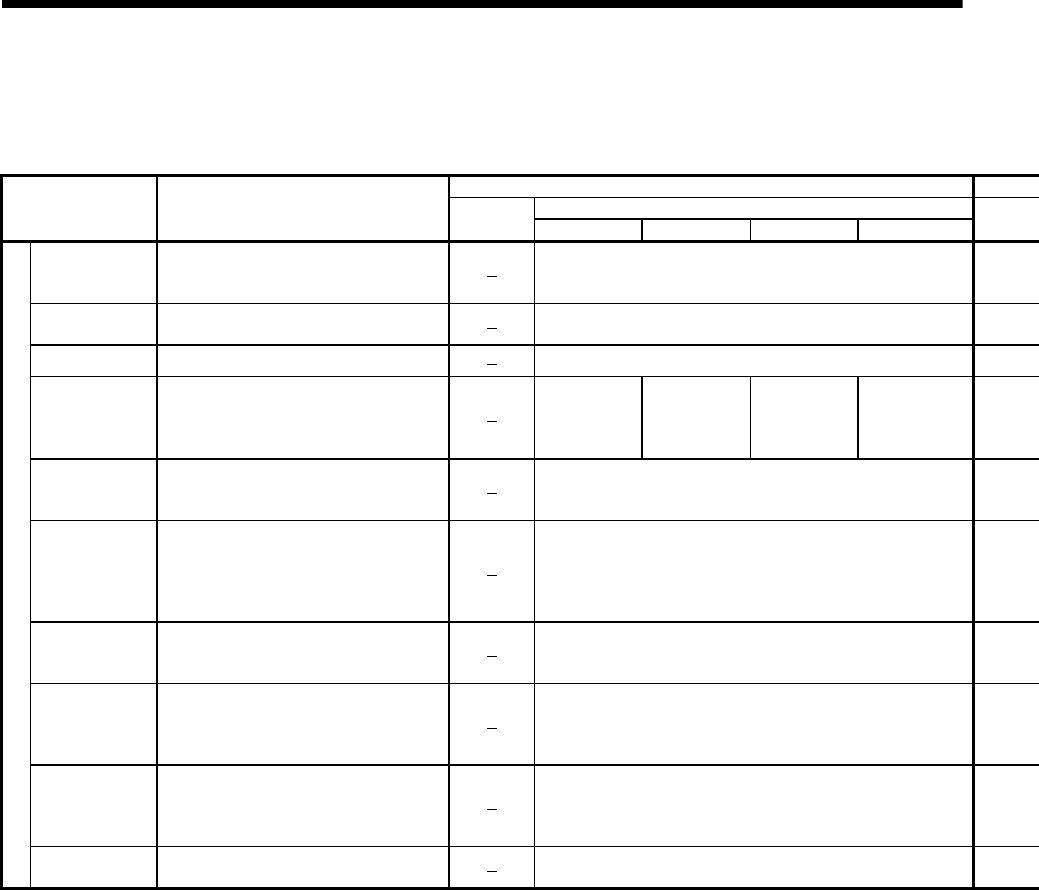
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.3 Positioning data (Continued)
Setting value using a peripheral device
Setting range
Name Explanation
Default
value
mm inch degree PLS
Repeat condition
(Number of
repetitions)
Set the repeat conditions between FOR-
TIMES instruction and NEXT instruction.
1 to 32767
Repeat condition
(ON/OFF)
Set the repeat conditions between FOR-
ON/OFF instruction and NEXT instruction.
X, Y, M, B, F
Program No.
Set the program No. for simultaneous start.
0 to 4095
Command speed
(constant-speed)
Set the speed for points on the way in the
servo program.
0.01 to
6000000.00
[mm/min]
0.001 to
600000.000
[inch/min]
0.001 to
2147483.647
[degree/min]
(Note-5)
1 to
2147483647
[PLS/s]
Cancel
Set to stop execution of a servo program by
deceleration stop by turning on the specified
bit device in the servo program.
X, Y, M, B, F
Skip
Set to cancel positioning to pass point and
execute the positioning to the next point by
turning on the specified bit device during
positioning at each pass point for constant-
speed control instruction.
X, Y, M, B, F
FIN acceleration/
deceleration
Set to execute positioning to each pass point
for constant-speed control instruction by
turning on the FIN signal.
1 to 5000[ms]
WAIT-ON/OFF
Set to make state of the wating for execution
by constnt-speed control and execute the
positioning immediately by turning on/off the
command bit device.
X, Y, M, B, F
Fixed position stop
acceleration/
deceleration time
Acceleration/deceleration time used in the
starting of speed control with fixed position
stop, speed change request (CHGV) or fixed
position stop command ON.
1 to 65535[ms]
Others
Fixed position stop
Command bit device of fixed position stop is
set.
X, Y, M, B, F