



















6 - 89
6 POSITIONING CONTROL
6.13 Speed Control ( )
(1) Speed control for the specified axis is executed.
(2) Control includes positioning loops for control of servo amplifiers.
(3) Speed control (
) uses the VF (Forward) and VR (Reverse) servo instructions.
Items are set in peripheral devices
Common Arc Parameter block Others
Servo
instruction
Positioning
method
Number of
control axes
Parameter block No.
Axis
Address/travel value
Command s
p
eed
Dwell time
M-code
Tor
q
ue limit value
Auxiliar
y
p
oint
Radius
Central
p
oint
Control unit
S
p
eed limit value
Acceleration time
Deceleration time
Ra
p
id sto
p
deceleration time
Tor
q
ue limit value
Deceleration
p
rocessin
g
on sto
p
in
p
ut
Allowable error ran
g
e for circular inter
p
olation
S-curve ratio
Cancel
WAIT-ON/OFF
Speed change
VF
VR
1
Valid
: Must be set
: Set if required
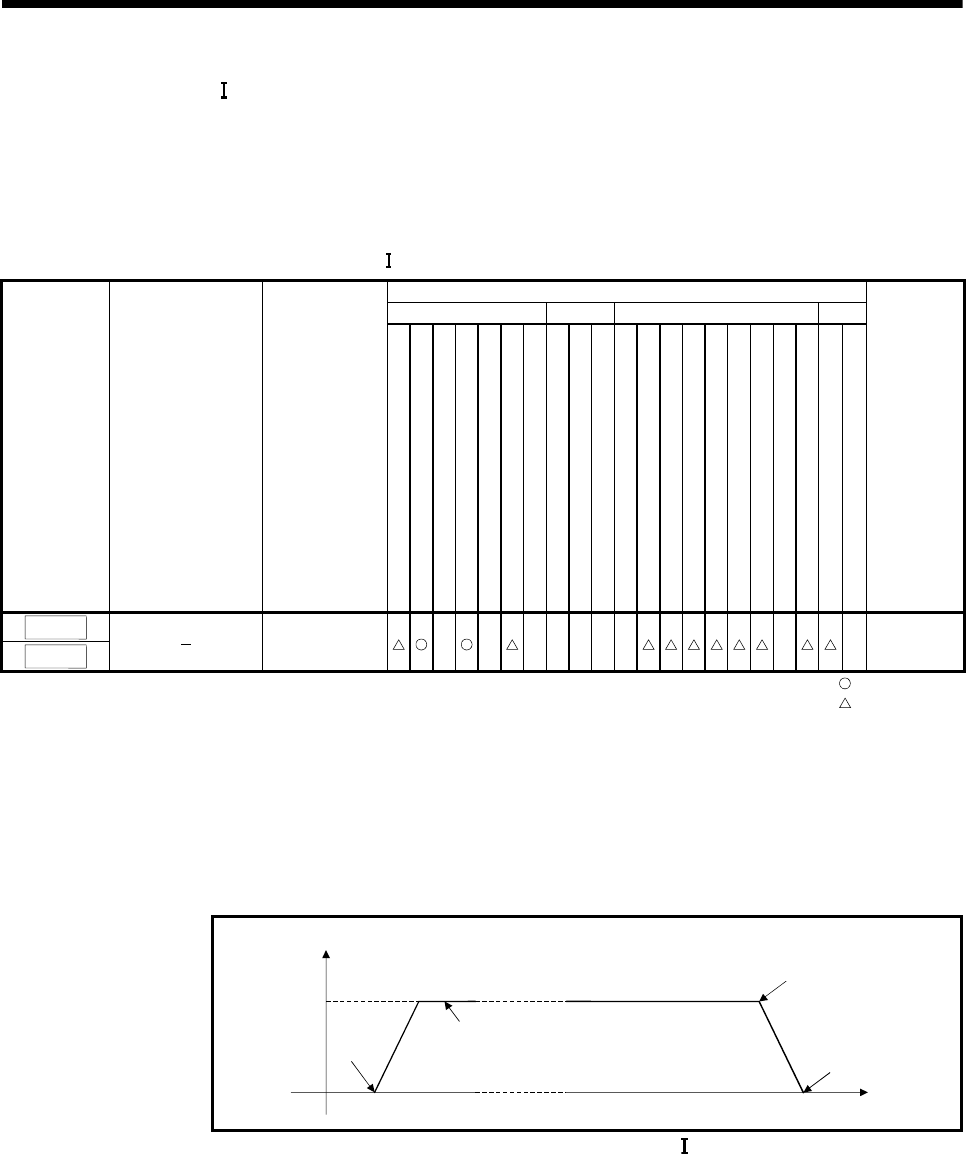
[Control details]
(1) Controls the axis at the specified speed until the input of the stop command after
starting of the servomotors.
• VF ......... Forward direction start
• VR ........ Reverse direction start
(2) Current value does not change at "0".
Stop
Stop command accept
Setting
speed
V
Speed
control
start
Operation speed
t
Fig.6.26 Speed control ( )