



















6 - 120
6 POSITIONING CONTROL
6.17 Constant-Speed Control
(1) Positioning to the pass point beforehand set by one starting is executed with the
specified positioning method and positioning speed.
(2) The positioning method and positioning speed can be changed for each pass
point.
(3) The following parameters is set in the servo program.
• Pass point
• Positioning method from any pass point to the next pass point.
• Positioning speed from any pass point to the next pass point.
(4) Repetition control between any pass points can be performed by using repetition
instructions.
(5) M-codes and torque limit values can be changed at each speed-switching point.
(6) 1 to 4 axes can be controlled.
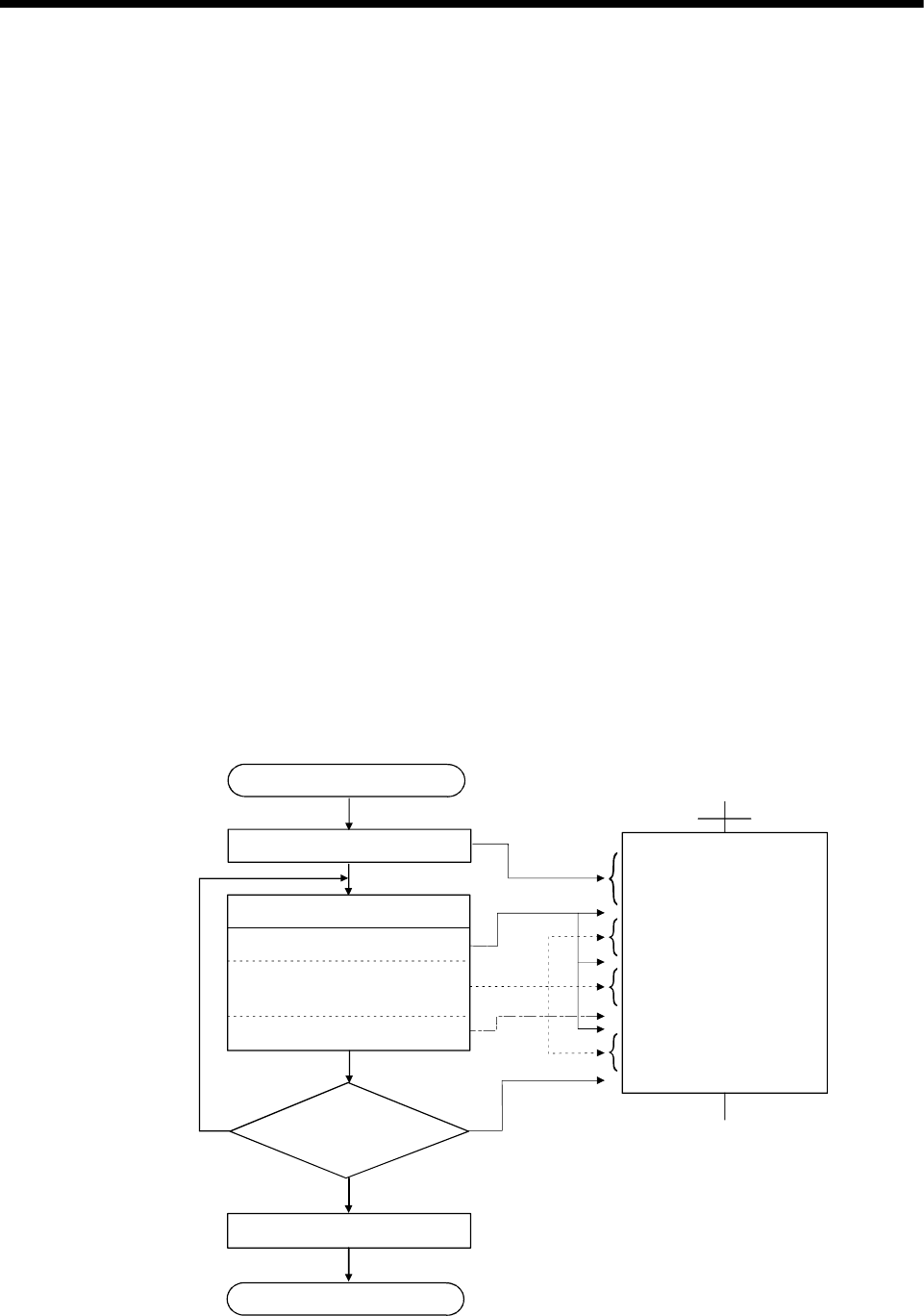
[Procedure to write servo programs]
The method to write the servo programs for constant-speed control is shown below.
[Procedure] [Example : Servo program for 2 axes
constant-speed control]
Set the constant-speed control
axis and speed
YES
End constant-speed control
Set the positioning address
(travel value)
Set the each pass point
All pass points are set ?
Set the positioning method
NO
Set the speed-switching
2
3
Point
4
Axis 3
<K 1>
1
Axis 2
Speed
4
CPSTART
ABS-2
CPEND
40000
[PLS/s]
10000
Axis 2,
Axis 3,
ABS-2
Axis 2,
Axis 3,
Speed
ABS-2
Axis 2,
Axis 3,
60000
60000
60000
15000
100000
80000
[PLS/s]
[PLS]
[PLS]
[PLS]
[PLS]
[PLS]
[PLS]
Start
End