



















6 -
199
6 POSITIONING CONTROL
(4) Cautions
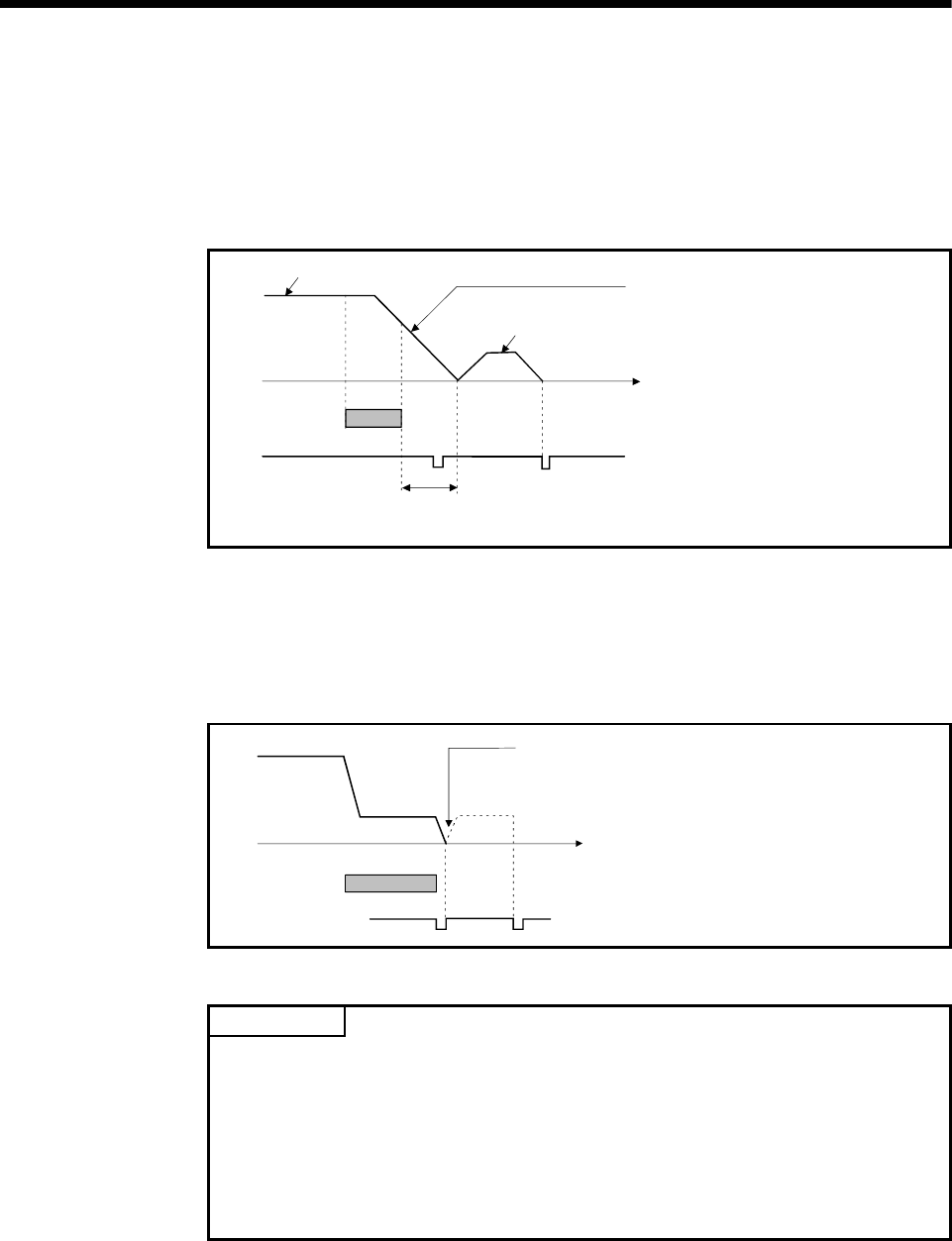
(a) Keep the proximity dog ON during deceleration from the home position
return speed to the creep speed.
If the proximity dog turns OFF before deceleration to the creep speed, a
deceleration stop is made and the next zero point is set as the home
position.
ON
Proximity dog
Setting creep speed
The zero point is passed during
deceleration stop by the proximity dog OFF.
Home position return speed
OFF
Zero point
Zero point of this range does not become the home position.
The next zero point becomes the home position.
(b) The position executed deceleration stop by the proximity dog OFF is near
zero point, a home position discrepancy equivalent to one revolution of the
servomotor may occur. Adjust the position of proximity dog OFF, such that
the home position return re-travel value becomes half the travel value for
one revolution of the servomotor.
OFF
ON
Proximity dog
If the position executed deceleration stop by the proximity dog
OFF is near zero point, the creep speed and deceleration
settings may result in a home position discrepancy
equivalent to one revolution of the servomotor.
Zero point
POINT
When the home position return retry function is not set in the following cases,
execute the home position return, after return the axis once to position before the
proximity dog ON by the JOG operation, etc.
Home position return cannot be executed without returning to position before the
proximity dog ON.
(1) Home position return with a position after the proximity dog ON to OFF.
(2) When the power supply turned OFF to ON after home position return end.