



















6 - 51
6 POSITIONING CONTROL
Control using INC
, INC (Incremental method)
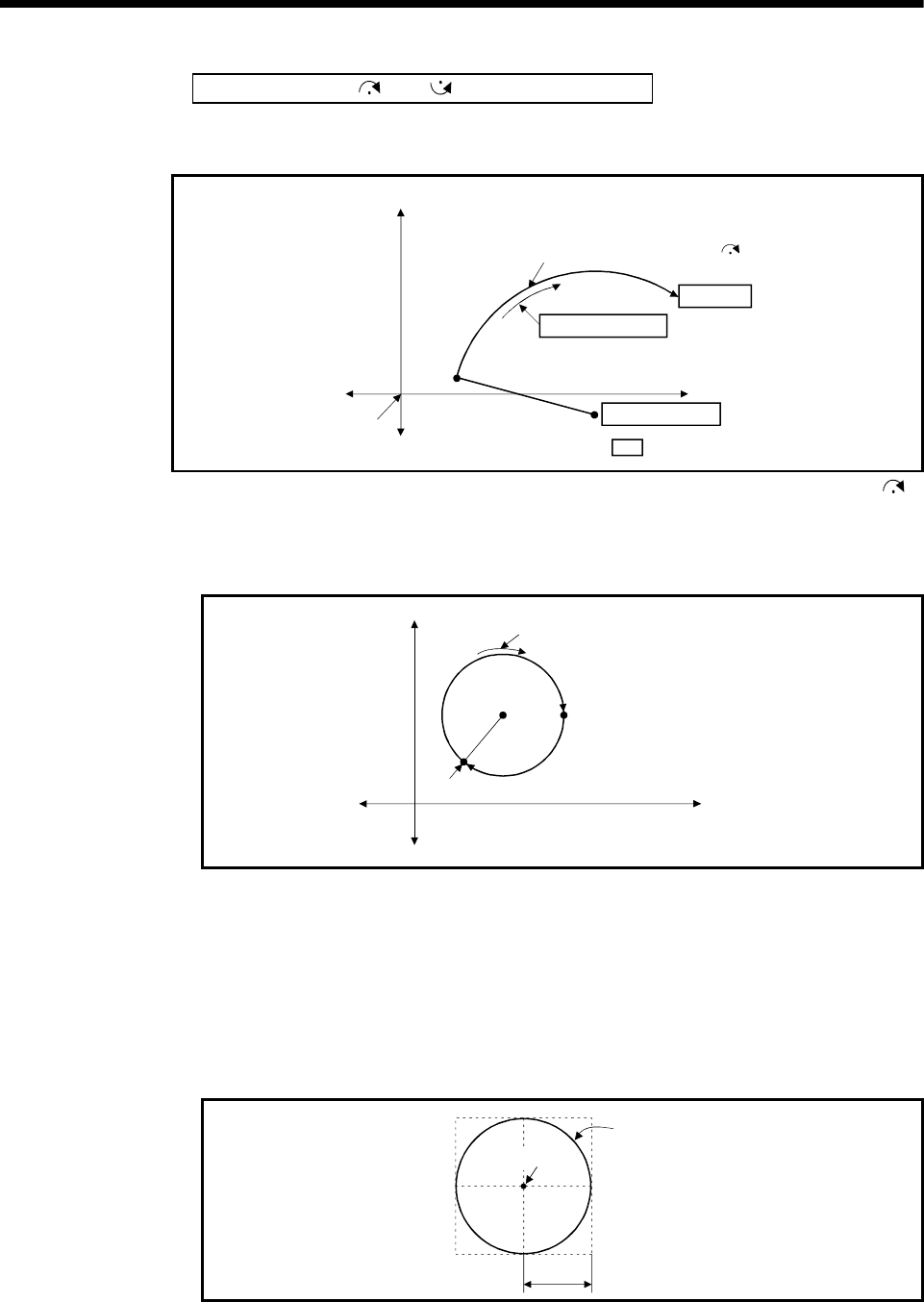
(1) Circular interpolation from the current stop address (0, 0) with a radius equivalent
to the distance between the start point (0, 0) and central point.
Forward direction
Home point
Reverse
direction
Operation by circular interpolation (for INC )
Positioning speed
End point
Arc central point
Start
point
Forward direction
Reverse direction
: Indicates setting data (Note)
Fig.6.20 Circular interpolation control using incremental data method (INC )
(2) Positioning control of a complete round is possible in the central point-specified
circular interpolation control.
Forward direction
Circular interpolation control
Arc central
point
0
Reverse
direction
0
Start address, end address
Reverse direction
Forward direction
Fig.6.21 Positioning control of a complete round
(3) Setting range of travel value to end point address and arc central point is 0 to
(2
31
-1).
(4) The maximum arc radius is (2
31
-1).
If the end point and central point are set more than a radius of (2
31
-1), an error
occurs at the start and error code [109] is stored in the data register.
Maximum arc
2
31
-1-2
31
2
31
-1
0
Radius R
Arc central point
Fig.6.22 Maximum arc radius