



















APP - 17
A
PPENDICES
APPENDIX 1.3 Major errors
These errors occur by control command from the external input signal or Motion SFC
program, and the error codes 1000 to 1999 are used.
Major errors include the positioning control start errors, positioning control errors,
absolute position system errors and system errors.
(1) Positioning control start errors (1000 to 1099)
These errors are detected at the positioning control start.
The error codes, causes, processing and corrective actions are shown in Table
1.8.
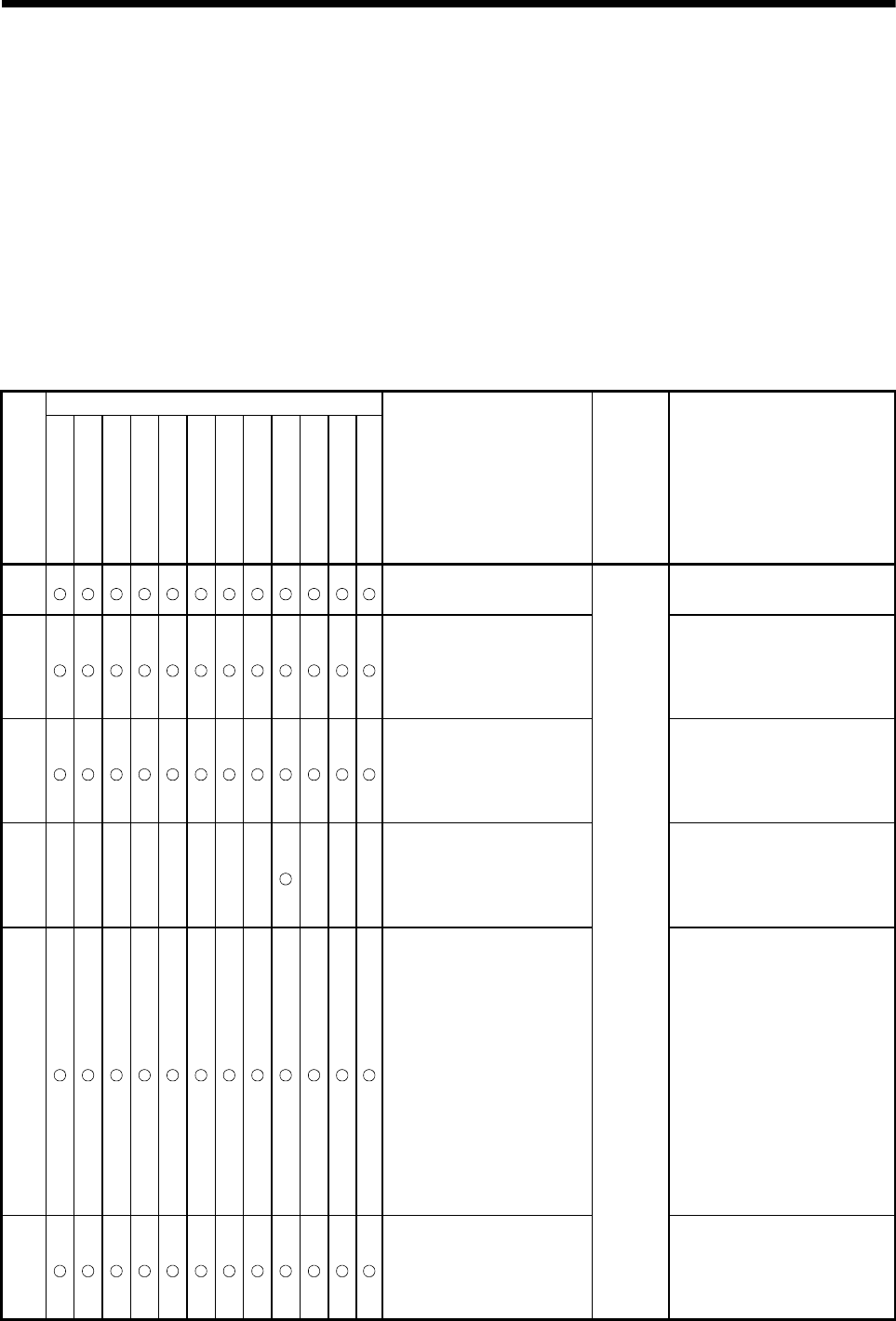
Table 1.8 Positioning control start error (1000 to 1099) list
Control mode
Error
code
Positioning
Fixed-pitch feed
Speed
Speed/position switching
Speed switching
Constant-speed
JOG
Manual pulse generator
Home position return
Position follow-up control
OSC
Speed control with
fixed
p
osition sto
p
Error cause
Error
processing
Corrective action
1000
• The external STOP signal of
the applicable axis turned on.
• Turn the STOP signal off.
1001
• The external signal FLS
(upper limit LS) turned off at
the forward direction
(address increase direction)
start.
• Move in the reverse direction by
the JOG operation, etc. and set
within the external limit range.
1002
• The external signal RLS
(lower limit LS) turned off at
the reverse direction
(address decrease direction)
start.
• Move in the forward direction by
the JOG operation, etc. and set
within the external limit range.
1003
• The external DOG (proximity
dog) signal turned on at the
home position return start of
the proximity dog type.
• Perform the home position return
after move to the proximity dog
ON by the JOG operation, etc.
at the home position return of
the proximity dog type.
1004
• The applicable axis is not
servo READY state.
(M2415+20n: OFF).
(1) The power supply of the
servo amplifier is OFF.
(2) During initial processing
after turning on the servo
amplifier.
(3) The servo amplifier is not
installed.
(4) A servo error is occurred.
(5) Cable fault.
(6) Servo OFF command
(M3215+20n) is ON.
• Wait until the servo READY
state (M2415+20n: ON).
1005
• The servo error detection
signal of the applicable axis
(M2408+20n) turned on.
Positioning
control
does not
start.
• Eliminate the servo error, reset
the servo error detection signal
(M2408+20n) by the servo error
reset command (M3208+20n),
then start operation.