


















6 -
197
6 POSITIONING CONTROL
(b) Input of home position return
In the indirect setting by the word devices, the specified word device data
are read at servo program execution by Motion CPU.
Set data to devices for indirect setting and then execute the start request
of servo program at home position return.
POINT
(1) Indirect setting of axis cannot be executed using word devices in the servo
program.
(2) Take an interlock with start accept flag (M2001 to M2032) not to change until
the device data specified for indirect setting.
If the device data is changed before starting accept, it may not execute the
home position return at the normal value.
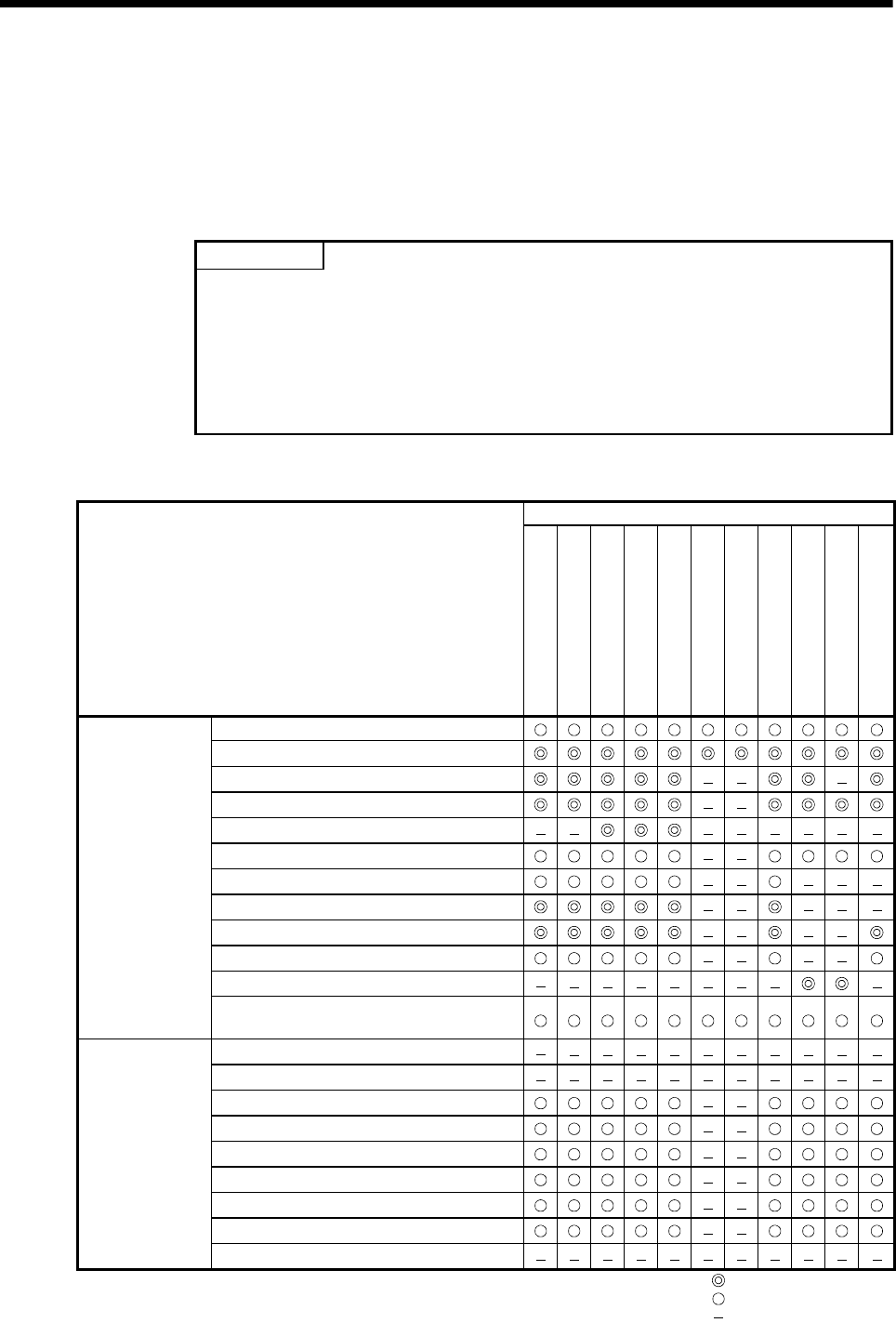
(7) Setting items for home position return data
Home position return methods
Items
Proximity dog type 1
Proximity dog type 2
Count type 1
Count type 2
Count type 3
Data set type 1
Data set type 2
Dog cradle type
Stopper type 1
Stopper type 2
Limit switch combined type
Home position return direction
Home position address
Home position return speed
Creep speed
Travel value after proximity dog ON
Parameter block setting
Home position return retry function
Dwell time at the home position return retry
Home position shift amount
Speed set at the home position shift
Torque limit value at the creep speed
Home position
return data
Operation setting for incompletion of home
position return
Interpolation control unit
Speed limit value
Acceleration time
Deceleration time
Rapid stop deceleration time
S-curve ratio
Torque limit value
Deceleration processing at the stop time
Parameter blocks
Allowable error range for circular interpolation
: Must be set (Indirect setting)
: Must be set
: Must be not set