



















APP - 10
A
PPENDICES
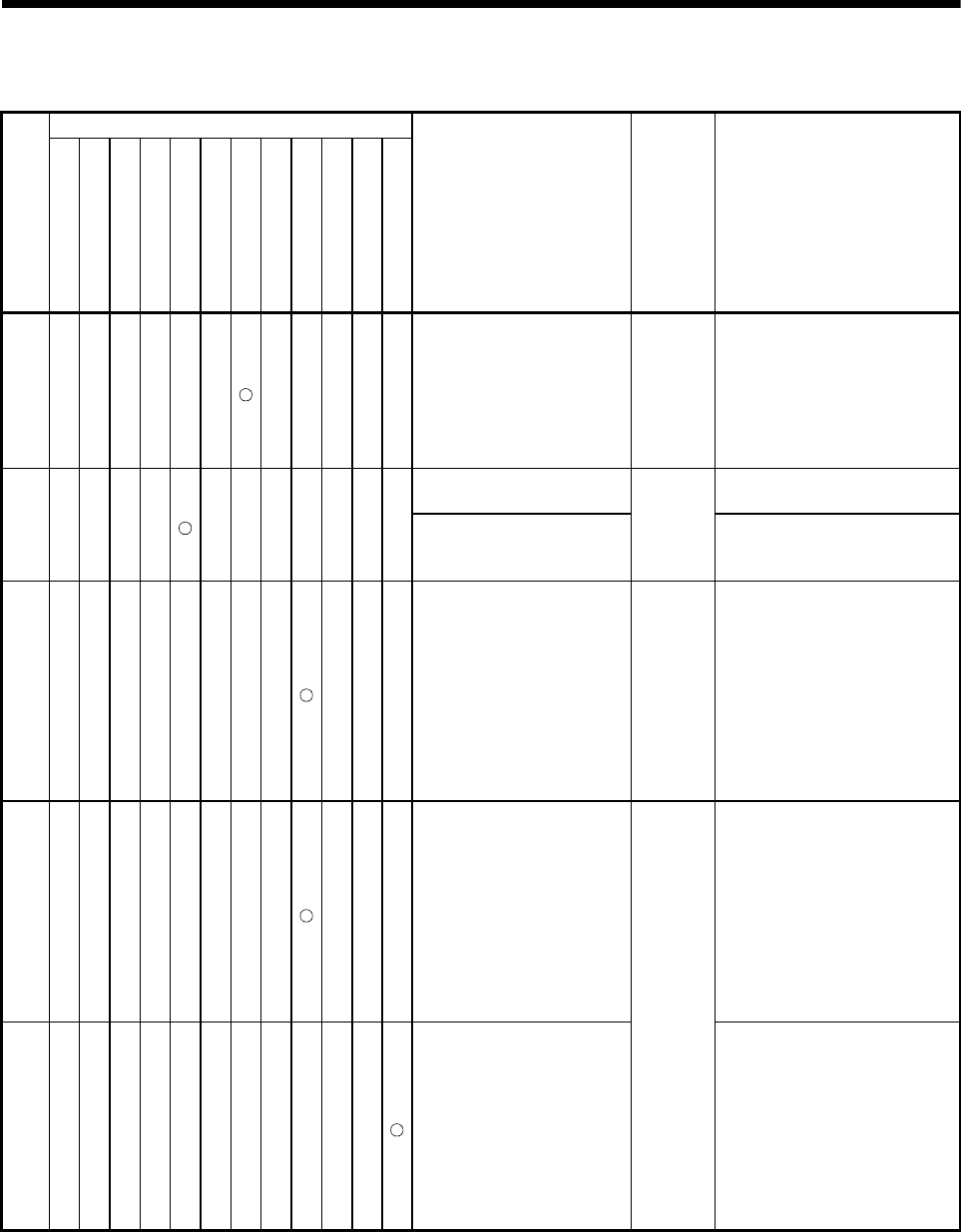
Table 1.4 Positioning control start error (100 to 199) list (Continued)
Control mode
Error
code
Positioning
Fixed-pitch feed
Speed
Speed/position switching
Speed switching
Constant-speed
JOG
Manual pulse generator
Home position return
Position follow-up control
OSC
Speed control with
fixed position stop
Error cause
Error
processing
Corrective action
117
• Both of forward and reverse
rotation were set at the
simultaneous start for the
JOG operation.
Only the
applicable
axis set to
the
forward
direction
starts.
• Set a correct data.
• The speed-switching point
exceeded the end address.
• Set the speed-switching point
before the end address.
118
• The address of the
positioning in the reverse
direction is not set.
Positioning
control
does not
start.
• Set the forward direction
adddress.
120
• ZCT not set
The zero pass signal
(M2406+20n) turned off at
the re-travel at the home
position return for proximity
dog, count and limit switch
combined type or start in the
home position return for
data set type.
Home
position
return is
not
completed
correctly.
• Execute the home position
return after the zero point
passed.
121
• When "Not execute servo
program" is selected in the
operation setting for
incompletion of home
position return, the home
position return request signal
(M2409+20n) turns on.
• Execute servo program after
home position return.
• In the system which enables
execution of servo program even
if the home position return
request signal (M2409+20n)
turns on, set "Execute servo
program" as "operation setting
for incompletion of home position
return".
130
• Speed control with fixed
position stop with was
started for the axis set in
except unit [degeree].
• Speed control with fixed
position stop was started in
the axis which is not "stroke
limit invalid".
Positioning
control
does not
start.
• Set the unit [degree] in the axis
which starts speed control with
fixed position stop.
• Set the stroke limit invalid
"(Upper stroke limit value) equal
to (lower stroke limit value)" in
the axis which starts speed
control with fixed position stop.