



















APP - 9
A
PPENDICES
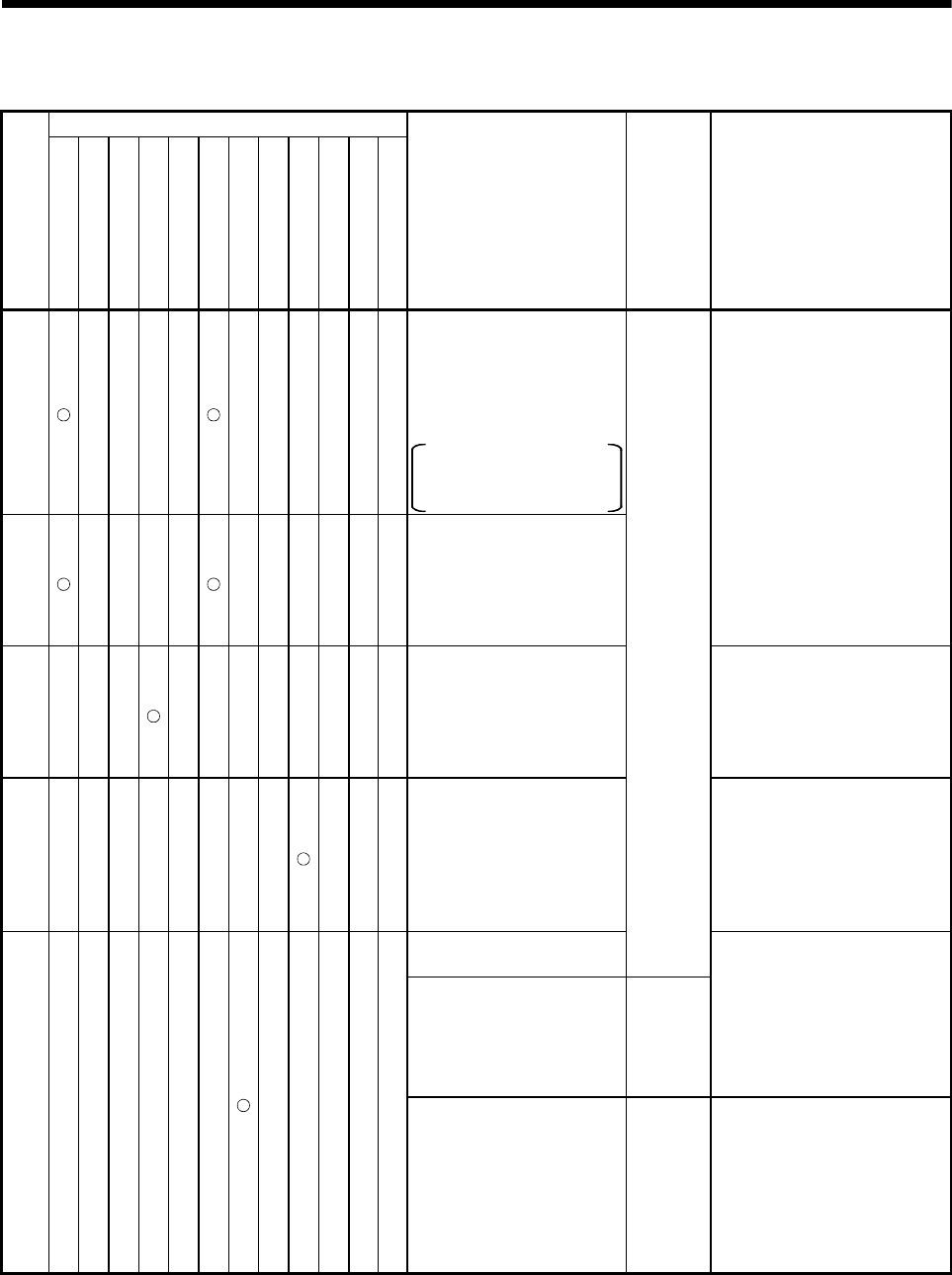
Table 1.4 Positioning control start error (100 to 199) list (Continued)
Control mode
Error
code
Positioning
Fixed-pitch feed
Speed
Speed/position switching
Speed switching
Constant-speed
JOG
Manual pulse generator
Home position return
Position follow-up control
OSC
Speed control with
fixed position stop
Error cause
Error
processing
Corrective action
• The address that does not
generate an arc is set at the
central point-specified
circular interpolation or
central point-specified helical
interpolation.
109
Relationship between
the start point, central
point and end point.
110
(Note)
• The difference between the
end point address and ideal
end point is outside the
allowable error range for
circular interpolation at the
circular interpolation.
• Correct the addresses of the
servo program.
111
• The speed/position control
restarting was performed,
although it was not after stop
during operation of the
speed/position switching
control.
• Do not re-start except the stop
during speed/position switching
control.
115
• The home position return
complete signal
(M2410+20n) turned on at
the home position return of
proximity dog, dog cradle
and stopper type.
• Do not start continuously for the
home position return.
Return to a point before the
proximity dog signal ON by
JOG operation or positioning
operation, etc., and perform the
home position return.
• The setting JOG speed is
"0".
Positioning
control
does not
start.
• The setting JOG speed
exceeded the JOG speed
limit value.
Control
with the
JOG
speed limit
value.
• Set the correct speed (within
the setting range).
116
• The setting JOG speed limit
value exceeded the setting
range.
Control
with the
maximum
setting
range of
each
control
unit.
• Set the correct JOG speed limit
value (within the setting range).
(Note): These errors are stored the error codes of the all applicable interpolation axes at the interpolation operation.