


















6 -
192
6 POSITIONING CONTROL
(1) Travel value after proximity dog ON
(a) The travel value after proximity dog ON is set to execute the count type
home position return.
(b) After the proximity dog ON, the home position is the first zero-point after
travel by the setting travel value.
(c) Set the travel value after proximity dog ON more than the deceleration
distance from the home position return speed.
The deceleration distance is calculated from the speed limit value, home position
return speed, creep speed and deceleration time as shown below.
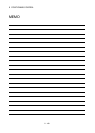
[Home position return operation]
Speed limit value : V
P=200kpps
. . . . . . Set 75 or more
Creep speed : V
C=1kpps
Real deceleration time : t=T
B
Home position return speed : VZ=10kpps
[Deceleration distance (shaded area under graph)]
Deceleration time : T
B=300ms
T
B
t
Converts in speed per millisecond
=
2
1
1000
V
Z
t
=
2000
V
Z
V
P
V
Z
T
B
=
2000
10
10
3
200
10
300 10
3
10
3
=
75
V
P
V
Z
POINT
A home position return must be made after the servomotor has been rotated more
than one revolution to pass the axis through the Z-phase (motor reference position
signal).
For a proximity dog type or count type home position return, the distance between
the point where the home position return program is started and the deceleration
stop point before re-travel must be such that the servomotor is rotated more than
one revolution to pass the axis through the Z-phase.
When a data set type home position return is made in an ABS (absolute position)
system, the servomotor must also have been rotated more than one revolution by
JOG operation or the like to pass the axis through the Z-phase.
(Note) : When "1 : No servomotor Z-phase pass after power ON" is selected in the
"function selection C-4" of servo parameter (expansion setting parameter),
even if it does not pass zero point, the home position return can be
executed and restrictions are lost.
Example