



















6 - 65
6 POSITIONING CONTROL
ABH
, ABH Absolute central point-specified helical interpolation control
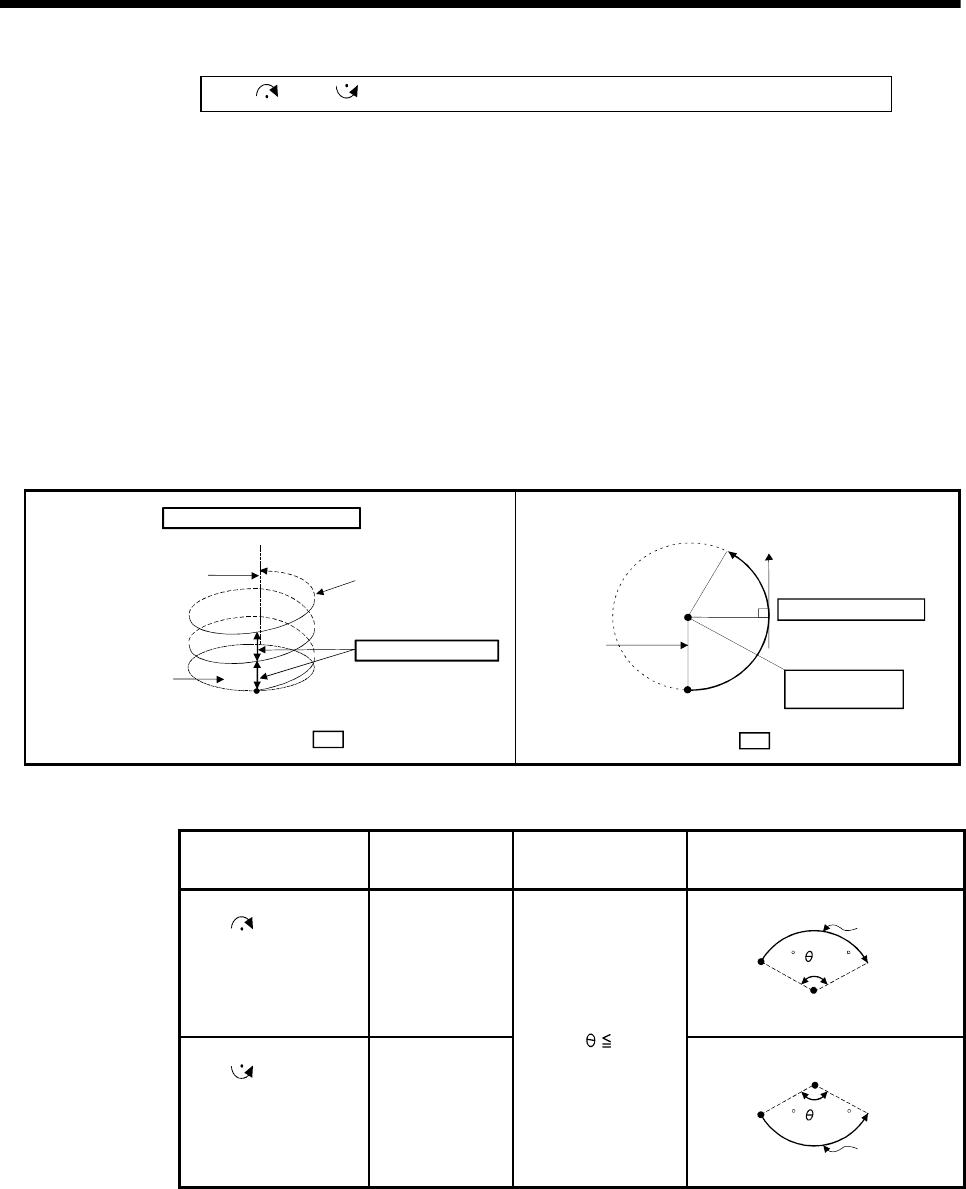
[Control details]
The linear interpolation to other linear axis is executed performing 2 axes circular
interpolation from current stop position (X0, Y0, Z0) to specified circular end address
(X1, Y1) or linear axis end point address (Z1), and the absolute helical interpolation is
executed so that it may become a spiral course.
It goes around on the specified circle for the specified number of pitches, the circular
interpolation which had remainder specified is executed, and positioning to end
address is executed. The central point-specified circle specifies circular interpolation
method connected start point and end point at the seeing on the plane for which
performs circular interpolation.
Operation details for absolute central point-specified helical interpolation are shown
below.
Number of pitches a
End point address (X
,
Y
,
Z )
Start point (X
0, Y0, Z0)
Helical interpolation
path
Circular interpolation
plane
Linear interpolation
travel value = Z
1-
Z
0
11 1
: Indicates setting range (Note)
Positioning speed V
1
Start point (X0,Y0)
Radius R
Arc central point
address (X
2, Y2)
Circular interpolation plane
End point address (X
1, Y1)
: Indicates setting range
(Note)
Control details for the servo instructions are shown below.
Instruction
Rotation direction
of servomotor
Controllable angle of
arc
Positioning pass
ABH
Central point-
specified helical
interpolation CW
Clockwise (CW)
Positioning path
Start point End point
Central point
0 < 360
<
=
ABH
Central point-
specified helical
interpolation CCW
Counter
clockwise (CCW)
0° <
360°
Central point
Start point End point
Positioning path
0 < 360
<
=
(1) The setting range of end point address for the both of circular interpolation axis
and linear interpolation axis is (-2
31
) to (2
31
-1).
(2) The setting range of central point address is (-2
31
) to (2
31
-1).