



















6 -
220
6 POSITIONING CONTROL
6.23.13 Home position return retry function
When a work has been exceeded home position during positioning control, etc., even if
it executes the home position return, depending on the position of work, a work may
not travel to home position direction. In this case, a work is normally travelled before
the proximity dog by the JOG operation, etc, and the home position return is started
again. However, by using the home position return retry function, even if a work is
where, the home position return can be executed.
Refer to Section 6.23.1(7) for home position return method by using the home position
return retry function.
[Data Setting]
When the "home position return retry function" is used, set the following "home position
return data" using a peripheral devices.
Set the "dwell time at the home position return retry" as required.
Set the parameters for every axis.
Table 6.4 Home position return data
Items Setting details
Setting
value
Initial value
Home position return
retry function
0 : Invalid (Do not execute the home position
return retry by limit switch.)
1 : Valid (Execute the home position return
retry by limit switch.)
0, 1 0
Dwell time at the home
position return retry
The stop time at the deceleration stop during
the home position return retry is set
0 to 5000
[ms]
0
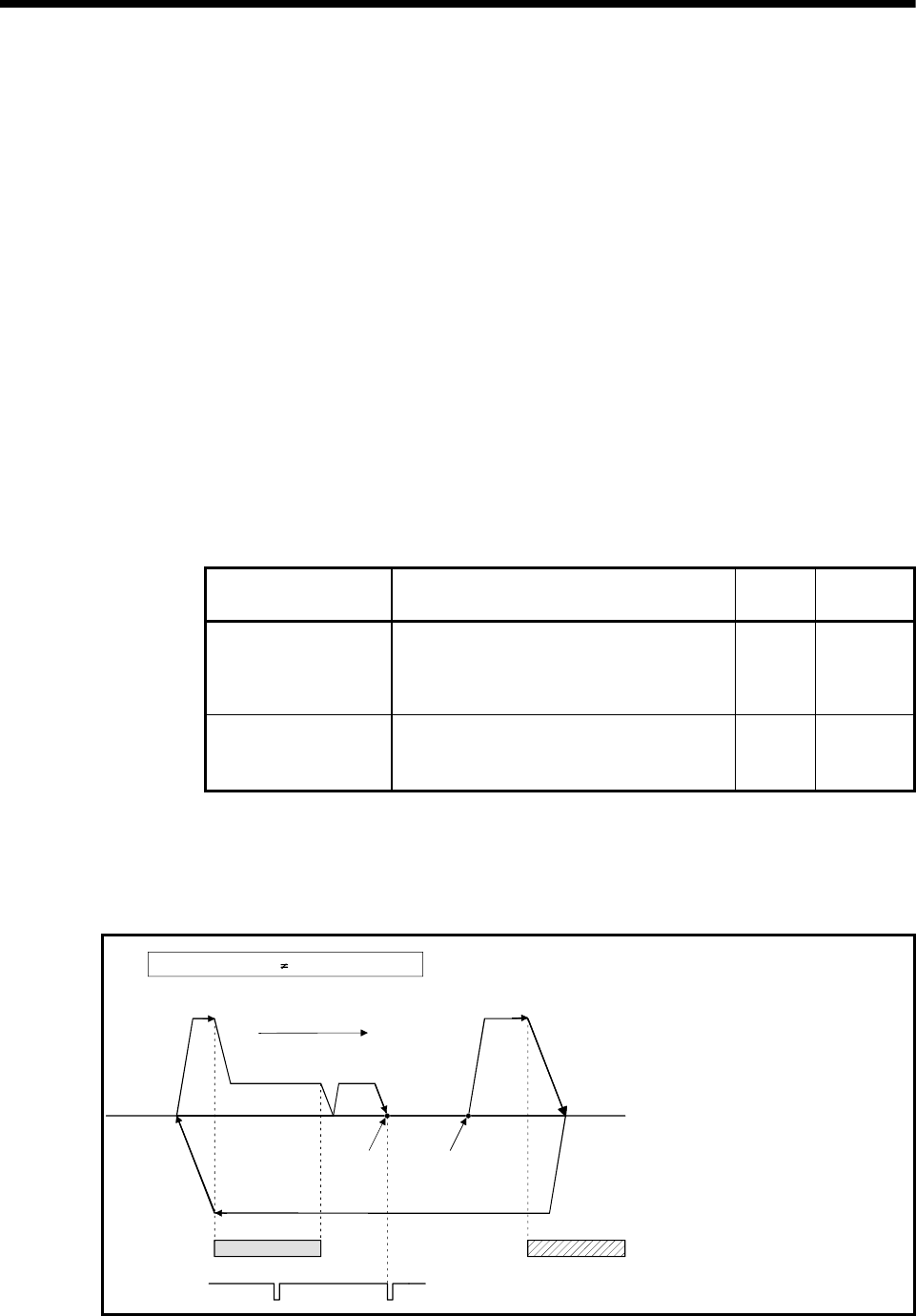
[Control details]
Operation for the home position return retry function is shown below.
(1) Home position return retry operation setting a work within the range of external
limit switch
1) It travels to preset direction of
home position return.
2) If the external upper/lower
limit switch turns OFF before
the detection of proximity dog,
a deceleration stop is made.
3) After a deceleration stop, it
travels to reverse direction of
home position return with the
home position return speed.
4) A deceleration stop is made by
the proximity dog OFF.
5) After a deceleration stop, it
travels to direction of home
position return.
6) Home position return ends.
Acceleration time Deceleration time
Home position
return direction
Home
position
Home position
return start
Zero point
External limit switch
1)
Proximity dog
2)
3)
6)
4)
5)
Fig. 6.44 Operation for home position return retry (proximity dog type)