


















6 - 142
6 POSITIONING CONTROL
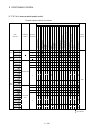
(e) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
SET M2042
CPSTART2
Axis 2
Axis 3
Speed 10000PLS/s
ABS-2
Axis 2, 30000PLS
Axis 3, 30000PLS
ABS
Axis 2, 50000PLS
Axis 3, 50000PLS
Radius
ABS-2
Axis 2, 90000PLS
Axis 3, 100000PLS
CPEND
PX000*M2435*M2455
END
!PX000
2 axes constant-speed control
2 axes constant-speed control
20000PLS
Turn on all axes servo ON command.
Wait until PX000, Axis 2 servo ready and Axis 3
servo ready turn on.
Start constant-speed control
Axis used . . . Axis 2, Axis 3
Positioning speed . . . . . . . . . .
10000[PLS/s]
2 axes linear interpolation control
Positioning address
Axis 2 . . . 30000[PLS]
Axis 3 . . . 30000[PLS]
Circular interpolation control
Radius . . . 20000[PLS]
2 axes linear interpolation control
End constant-speed control
Positioning address
Axis 2 . . . 50000[PLS]
Axis 3 . . . 50000[PLS]
Positioning address
Axis 2 . . . 90000[PLS]
Axis 3 . . 100000[PLS]
Wait until PX000 turn off after constant-speed control
completion.
[F10]
[G10]
[K505]
[G20]
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
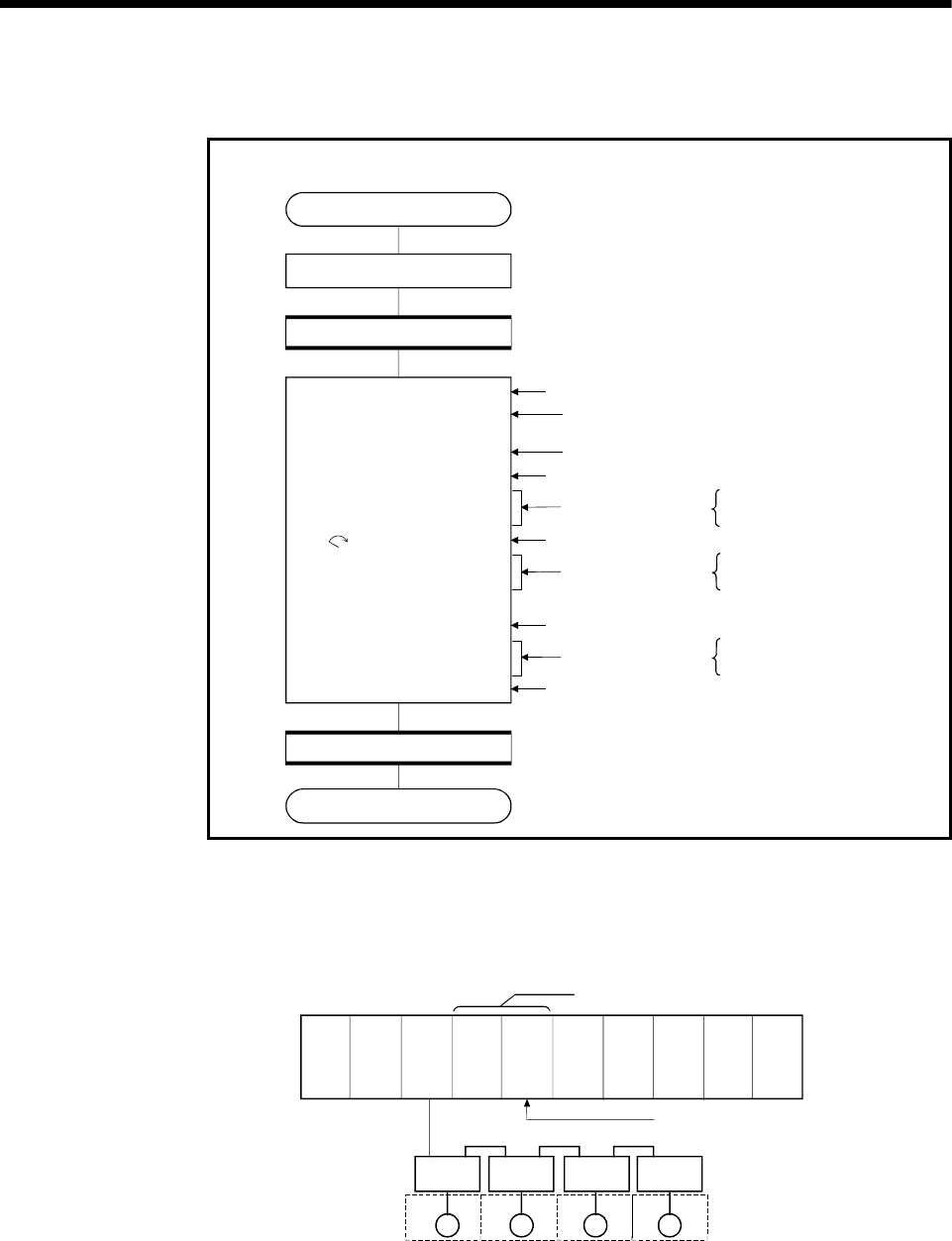
(2) Program for 4 axes constant-speed control is shown as the following conditions.
(a) System configuration
Constant-speed control for Axis 1, Axis 2, Axis 3, and Axis 4.
MM MM
Motion CPU control module
Start command (PX000)
Axis
4
Axis
1
Axis
2
Axis
3
AMP AMP AMP AMP
Q61P Q02H
CPU
Q172H
CPU
Q172
LX
QX41