



















6 -
162
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program, PLC program and parameter setting for position follow-up
control is shown below.
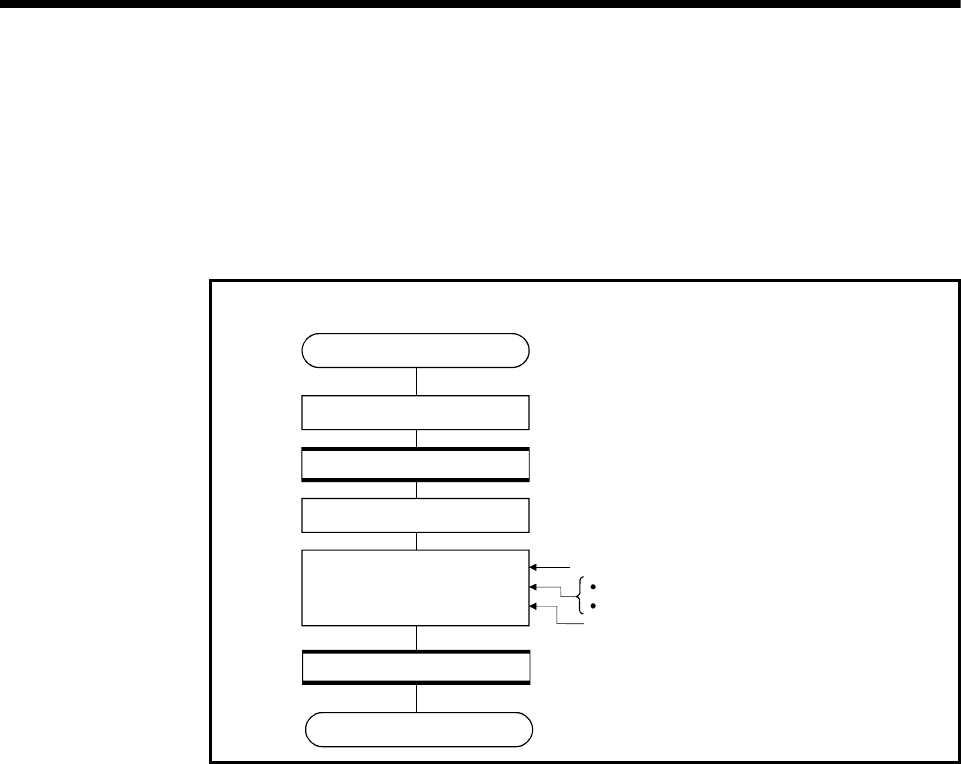
(a) Motion SFC program
Motion SFC program example for position follow-up control is shown below.
This program is started using S(P).SFCS instruction from PLC CPU (CPU
No.1).
Position follow-up control
SET M2042
M2049*M2455
END
!M2003
D4000L=K100
Transfer the axis 3 positioning address to D4000.
PFSTART
Axis 3, D4000
Speed 20000PLS/s
Position follow-up control
Turn on all axes servo ON command.
Wait until all axes servo ON accept flag and
Axis 3 servo ready turn on.
Position follow-up control
Axis used
Positioning address . . . D4000
Positioning speed . . . . 2000[PLS/s]
. . . . . . . . . . Axis 3
Wait until Axis 3 start accept flag turn off after
position follow-up control completion.
[G10]
[G20]
[F10]
[F20]
[K100]
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.