



















6 - 122
6 POSITIONING CONTROL
(b) The speed switching and change speed by CHGV instruction are executed
toward the same program in the servo program.
The lower of the speed change by CHGV instructions and the command
speed in the servo program is selected.
The speed change by CHGV instructions are executed if the speed is lower
than the speed set in the servo program; otherwise the CHGV instructions
are not executed.
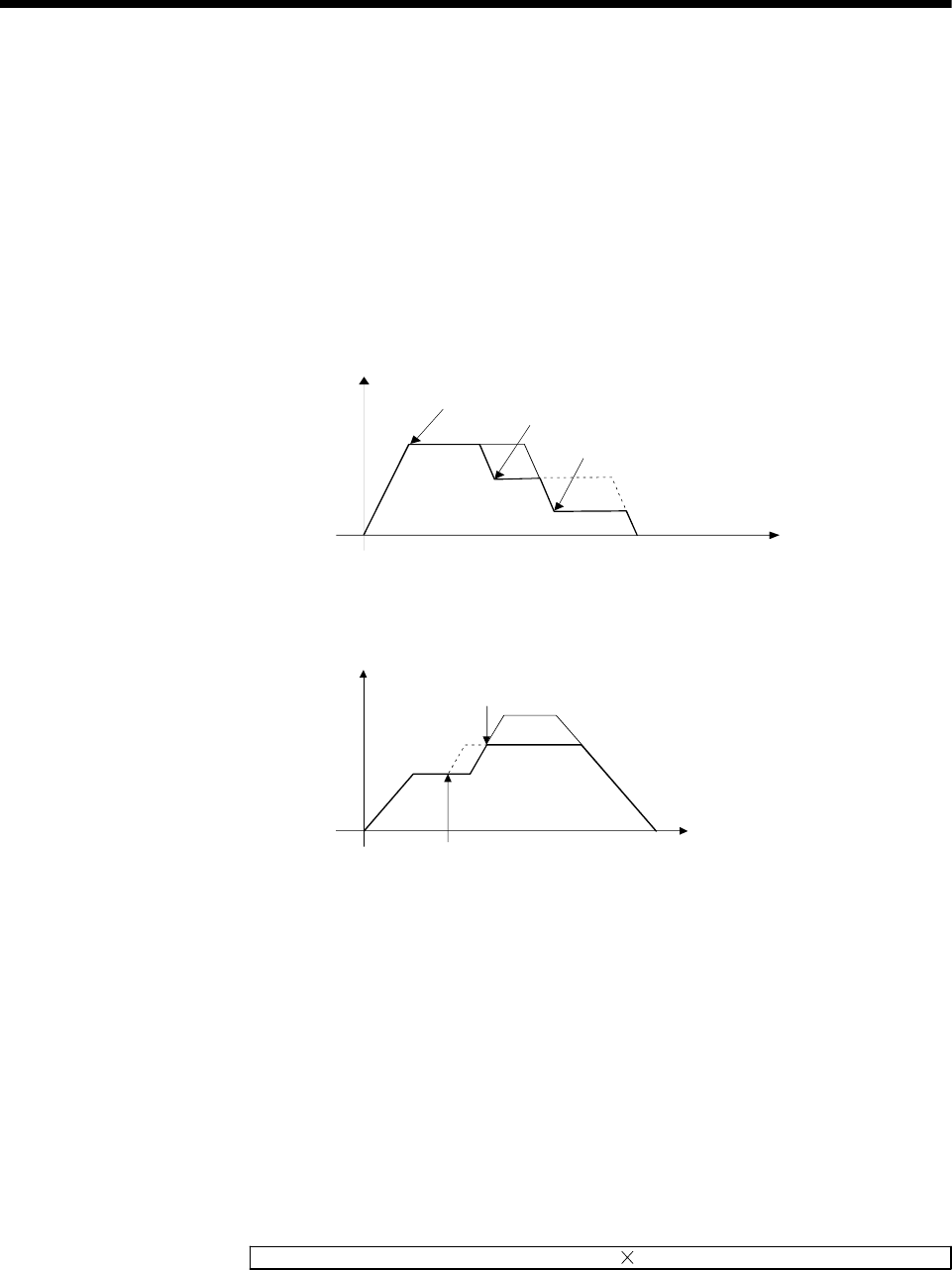
1) Change speed by CHGV instruction > command speed in the servo
program
The command speed in the servo program is selected.
V
Speed change to command speed in the servo program
Command speed in the servo program
Speed change by CHGV instruction
t
2) Change speed by CHGV instruction < command speed in the servo
program
The change speed by CHGV instructions is effective.
V
Speed change by command speed in the servo program
(Speed set by the CHGV instructions is valid)
Speed change by CHGV instructions
(Speed does cot change due to more than command speed in the servo program.)
t
(5) An overrun occurs if the distance remaining to the final positioning point when the
final positioning point is detected is less than the deceleration distance at the
positioning speed after the start (command speed).
The error code [211] (overrun error) is stored in the minor error storage register
for each axis.
(6) If positioning to outside the stroke limit range is executed after the start, the error
code [106] is stored in the minor error storage register for each axis and a
deceleration stop is executed.
(7) The minimum travel value between constant-speed control pass points is shown
below:
Command speed per second (control unit/s) Main cycle [s] < Travel distance [PLS]