
















APP - 27
A
PPENDICES
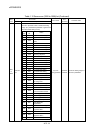
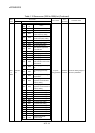
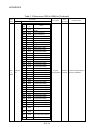
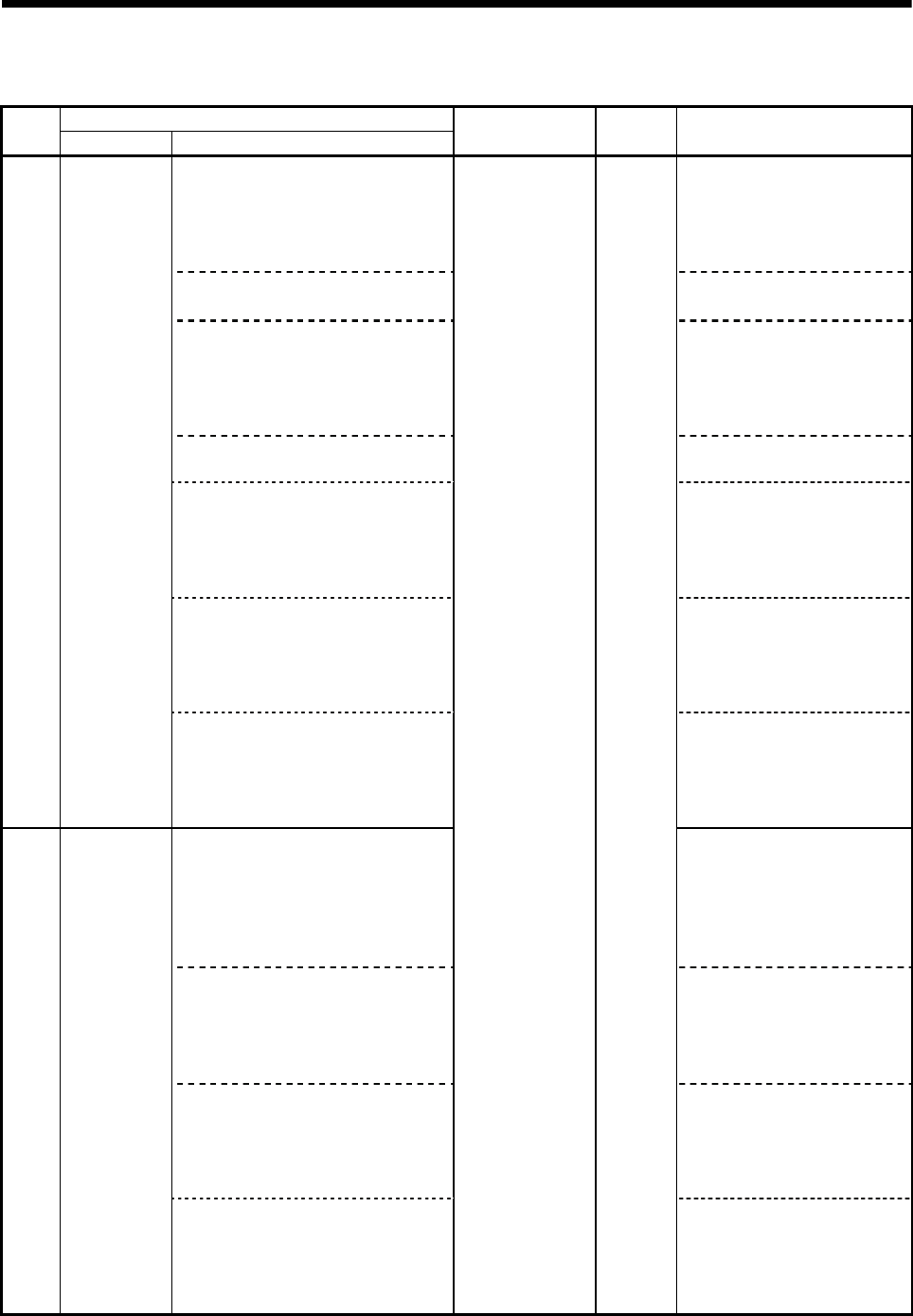
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error cause Error
code
Name Description
Error check
Error
processing
Corrective action
• Linear encoder signal resolution diffes
from the setting value.
• Review the settings of parameter
No.PS02 and PS03 setting
(linear encoder resolution).
• Check the installation of linear
encoder.
• Initial magnetic pole detection has not
been performed.
• Perform initial magnetic pole
detection.
• Mismatch of the linear encoder
installation direction.
• Check the installation direction of
linear encoder.
• Review the setting of parameter
No. PC27 (encoder pulse count
polarity).
• Wrong wiring of the servomotor wires
(U, V, and W).
• Correct the wiring.
• The position deviation exceeded the
detection level.
• Review the operation condition.
• Review the setting of parameter
No.PS05 (Linear servo control
position deviation error detection
level) as required.
• The speed deviation exceeded the
detection level.
• Review the operation condition.
• Review the setting of parameter
No.PS06 (Linear servo control
speed deviation error detection
level) as required.
2042
Linear servo
control error
(Linear servo
amplifier)
• The thrust deviation exceeded the
detection level.
• Review the operation condition.
• Review the setting of parameter
No.PS07 (Linear servo control
thrust deviation error detection
level) as required.
• Load side encoder resolution differs from
the setting value.
• Review the settings of parameter
No.PE04 and PE05 (Fully closed
loop control feedback pulse
electronic gear).
• Check the installation of load side
encoder.
• Mismatch of the load side encoder
installation direction.
• Check the installation direction of
load side encoder.
• Review the setting of parameter
No. PC27 (encoder pulse count
polarity).
• The position deviation exceeded the
detection level.
• Review the operation condition.
• Review the setting of parameter
No.PE07 (Fully closed loop
control position deviation error
detection level) as required.
2042
Fully closed
control error
(Fully closed
loop control
servo amplifier)
• The speed deviation exceeded the
detection level.
• Servo amplifier
power on.
• Multiple CPU
system power on.
Immediate
stop
• Review the operation condition.
• Review the setting of parameter
No. PE06 (Fully closed loop
control speed deviation error
detection level) as required.