



















6 - 93
6 POSITIONING CONTROL
6.14 Speed Control ( )
(1) Speed control for the specified axis is executed.
(2) Speed control not includes positioning loops for control of servo amplifiers.
It can be used for stopper control, etc. so that it may not become error excessive.
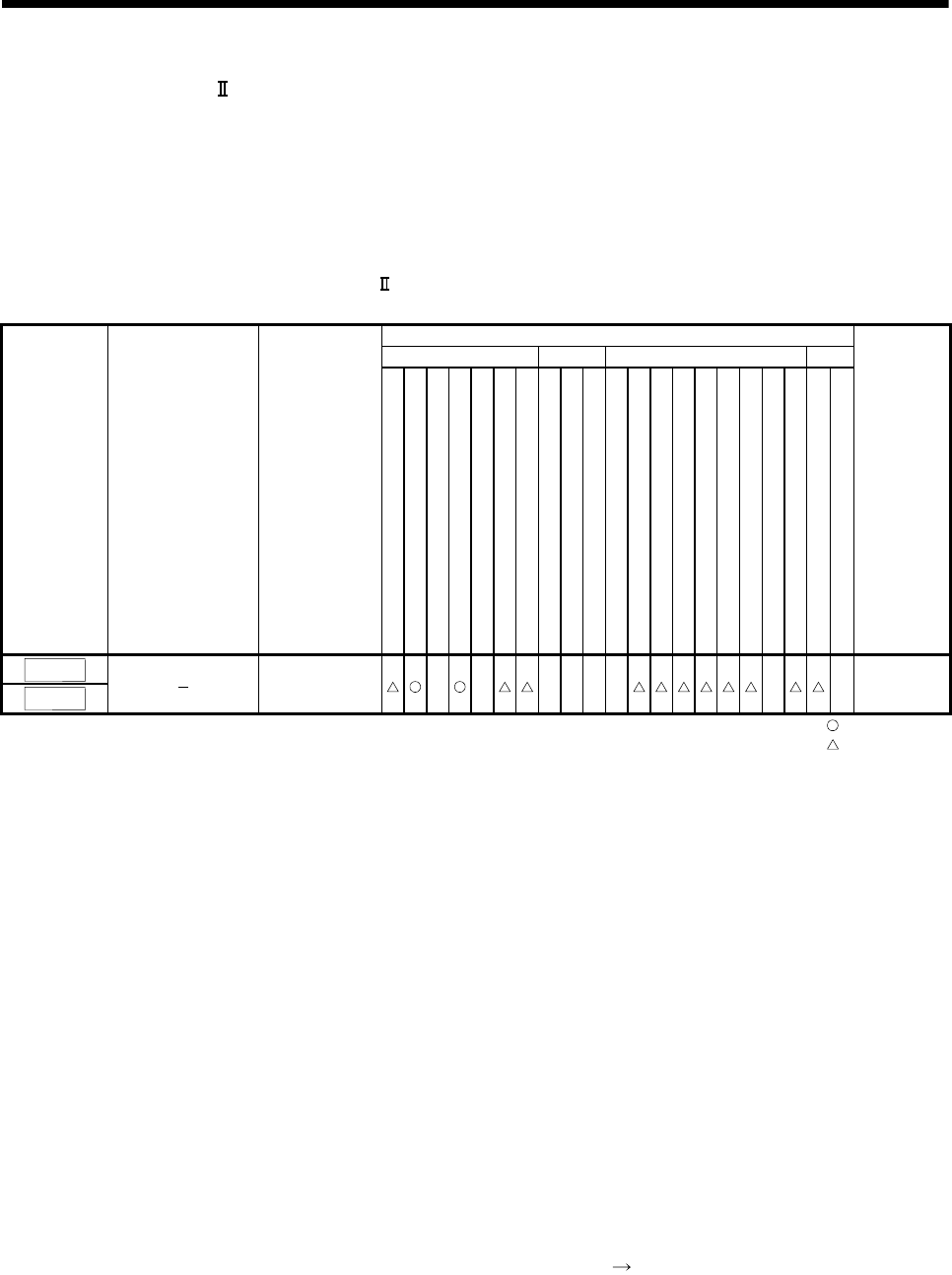
(3) Speed control (
) uses the VVF (Forward) and VVR (Reverse) servo instructions.
Items are set in peripheral devices
Common Arc Parameter block Others
Servo
instruction
Positioning
method
Number of
control axes
Parameter block No.
Axis
Address/travel value
Command s
p
eed
Dwell time
M-code
Tor
q
ue limit value
Auxiliar
y
p
oint
Radius
Central
p
oint
Control unit
S
p
eed limit value
Acceleration time
Deceleration time
Ra
p
id sto
p
deceleration time
Tor
q
ue limit value
Deceleration
p
rocessin
g
on sto
p
in
p
ut
Allowable error ran
g
e for circular inter
p
olation
S-curve ratio
Cancel
WAIT-ON/OFF
Speed change
VVF
VVR
1
Valid
: Must be set
: Set if required
[Control details]
(1) Controls the axis at the specified speed until the input of the stop command after
starting of the servomotors.
• VVF ....... Forward direction start
• VVR....... Reverse direction start
(2) Current value or deviation counter do not change at "0".
(3) When the setting for "torque" is set in the servo program and an indirect setting
made, the torque limit value can be changed during operation by changing the
value of the indirect device.
(4) The stop command and stop processing are the same as for speed control (I).
[Cautions]
(1) After executing of the speed control using the absolute position system, the feed
current value cannot be set to "0" by the following operations:
• Reset
• Turning the servo power supply on (OFF
ON)
(2) The dwell time cannot be set.