



















6 - 46
6 POSITIONING CONTROL
[Program]
Program for radius-specified circular interpolation control is shown as the following
conditions.
(1) System configuration
Radius-specified circular interpolation control of Axis 1 and Axis 2.
Positioning start command (PX000)
MM MM
Motion CPU control module
Axis
4
Axis
1
Axis
2
Axis
3
AMP AMP AMP AMP
Q61P Q02H
CPU
Q172H
CPU
Q172
LX
QX41
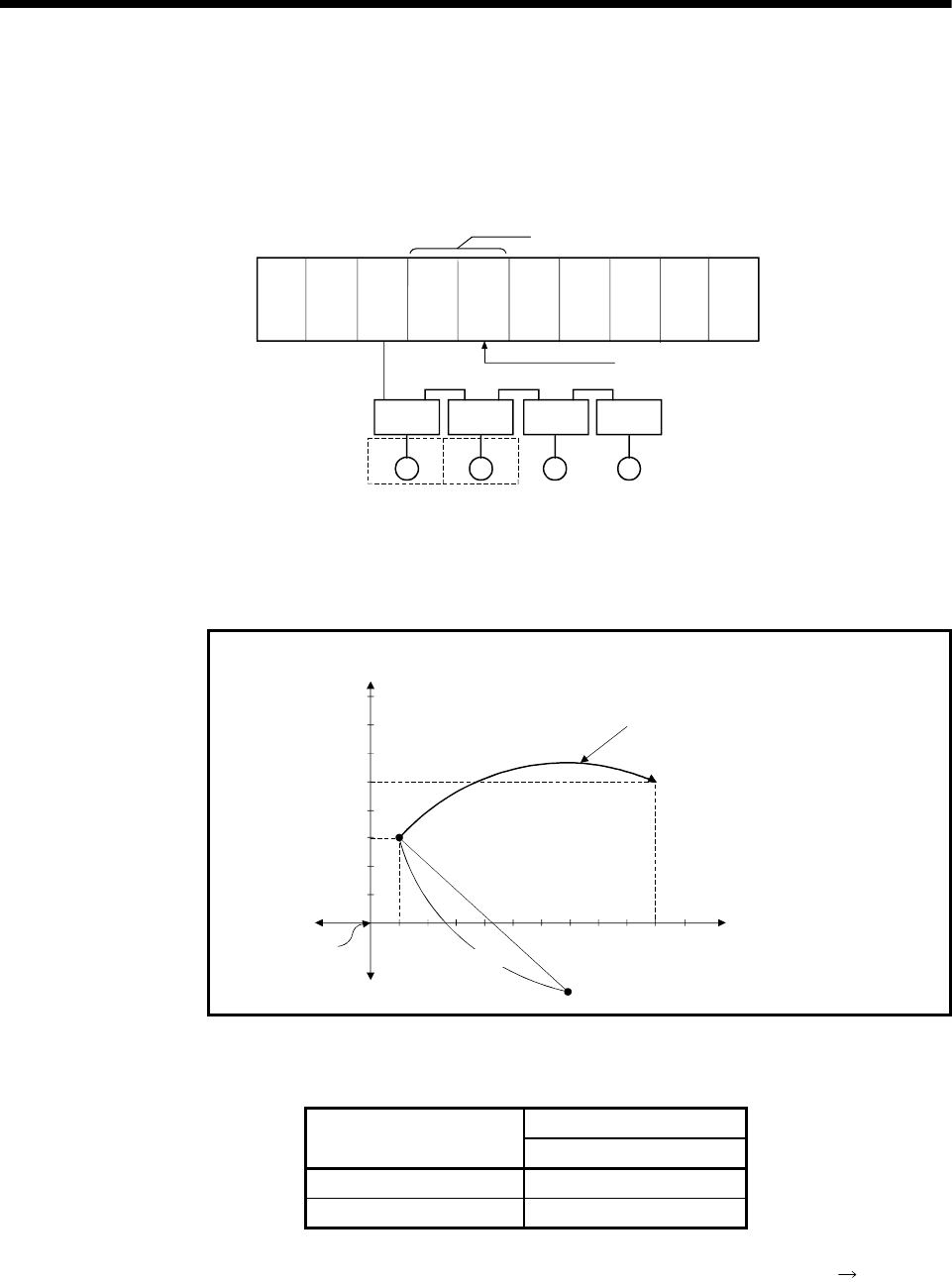
(2) Positioning operation details
The positioning uses the Axis 1 and Axis 2 servomotors.
The positioning by the Axis 1 and Axis 2 servomotors is shown in the diagram
below.
Axis 2 positioning direction
(Forward direction)
Positioning using the servo program
No.41.
End point (100000, 50000)
”¼Œa 80000
Arc central point
Radius 80000
10000010000
30000
50000
Start point
(10000, 30000)
(Reverse
direction)
Home position
0
(Reverse direction)
Axis 1 positioning direction
(Forward direction)
(3) Positioning conditions
(a) Positioning conditions are shown below.
Servo Program No.
Item
No.41
Positioning method Absolute data method
Positioning speed 1000
(b) Positioning start command ........ Turning PX000 off to on (OFF
ON)