



















6 -
167
6 POSITIONING CONTROL
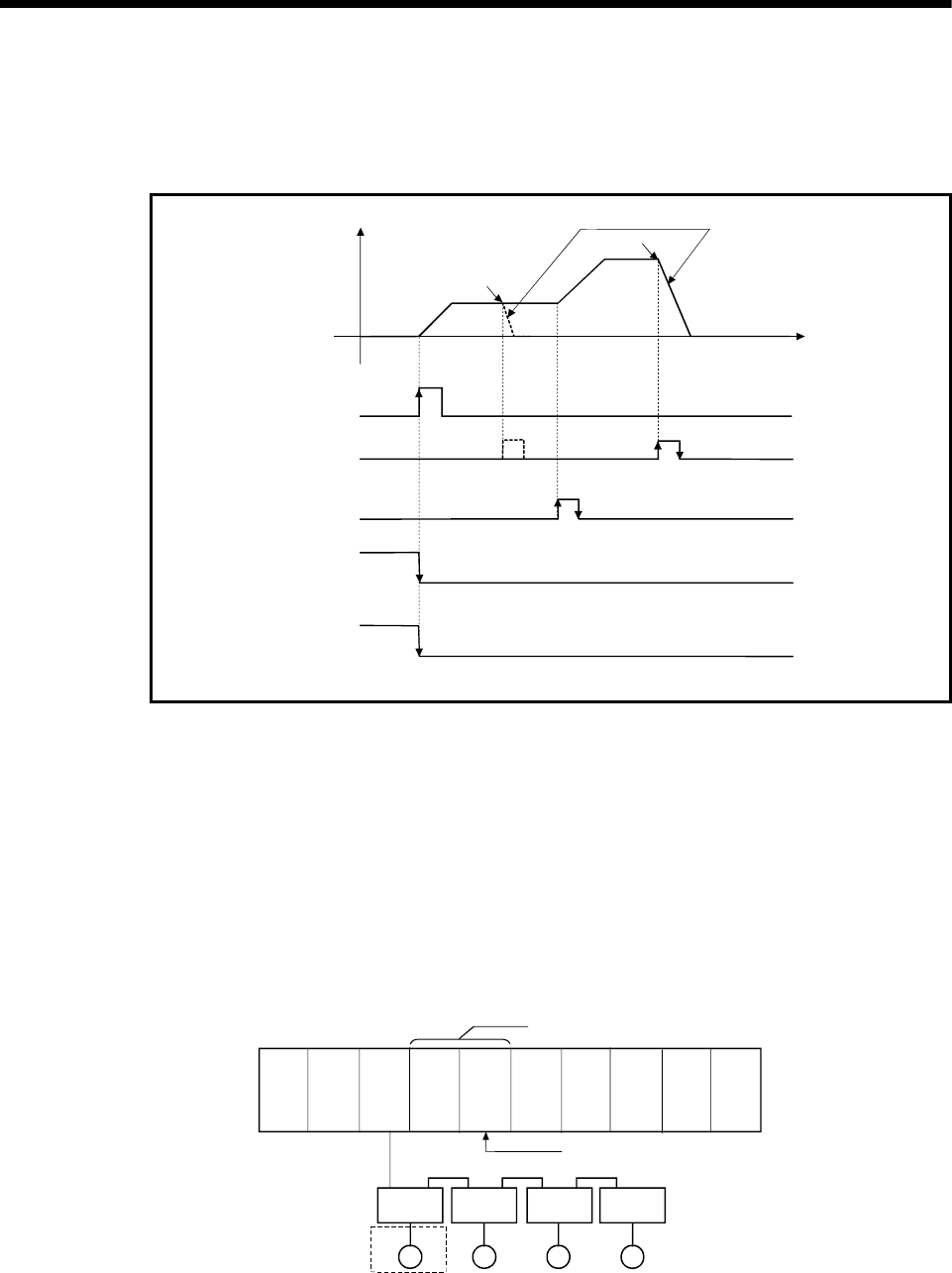
(10) Deceleration speed by the stop command (M3200+20n)/rapid stop command
(M3201+20n) is controlled with fixed inclination (deceleration speed).
Deceleration processing is executed using the speed limit value or deceleration/
rapid stop deceleration time set in the parameter block.
OFF
ON
ON
OFF
ON
OFF
OFF
ON
V
t
OFF
ON
Servo program star
t
Rapid stop command
(M3201+20n),
servo error, etc.
Speed change request
(CHGV)
Positioning complete
signal (M2401+20n)
Command in-position
signal (M2403+20n)
(Note-1)
(
Note-1
)
: Rapid stop cause
(Note-1)
Rapid stop by fixed inclination
(deceleration speed).
(Inclination is set by the speed
limit value and rapid stop
deceleration time of paramete
r
block.)
(11) When the fixed position stop command turns on, the command in-position check
starts. When the absolute value of difference between the setting address and
feed current value below the "command in-position range" set in the fixed
parameter, the command in-position signal (M2403+20n) turns on. The
command in-position signal (M2403+20n) turns on by a positioning start.
[Program]
Program for speed control with fixed position stop is
shown as the following conditions.
(1) System configuration
Speed control with fixed position stop for "Axis 1.
Positioning start command (PX000)
MM MM
Motion CPU control module
Axis
4
Axis
1
Axis
2
Axis
3
AMP AMP AMP AMP
Q61P Q02H
CPU
Q172H
CPU
Q172
LX
QX41