


















APP - 50
A
PPENDICES
[Program Example]
(1) A program that outputs each error code to PY000 to PY00F (minor error), PY010
to PY01F (major error) and PY020 to PY02F (servo error) after conversion into
BCD code at the error occurrence with axis 1 is shown below.
QY40
Motion SFC program
Q61P Q172
LX
Q172H
CPU
M2407
PY000
to
PY00F
D6!=K0
D7!=K0
#0=BCD(D6)
DOUT PY0, #0
#0=BCD(D7)
DOUT PY10, #0
END
M2408*(D8!=0)
#0=BCD(D8)
DOUT PY20, #0
END
#0=K0
Store to "#0".
#0=K0
QY40
PY010
to
PY01F
QY40
PY020
to
PY02F
System configuration
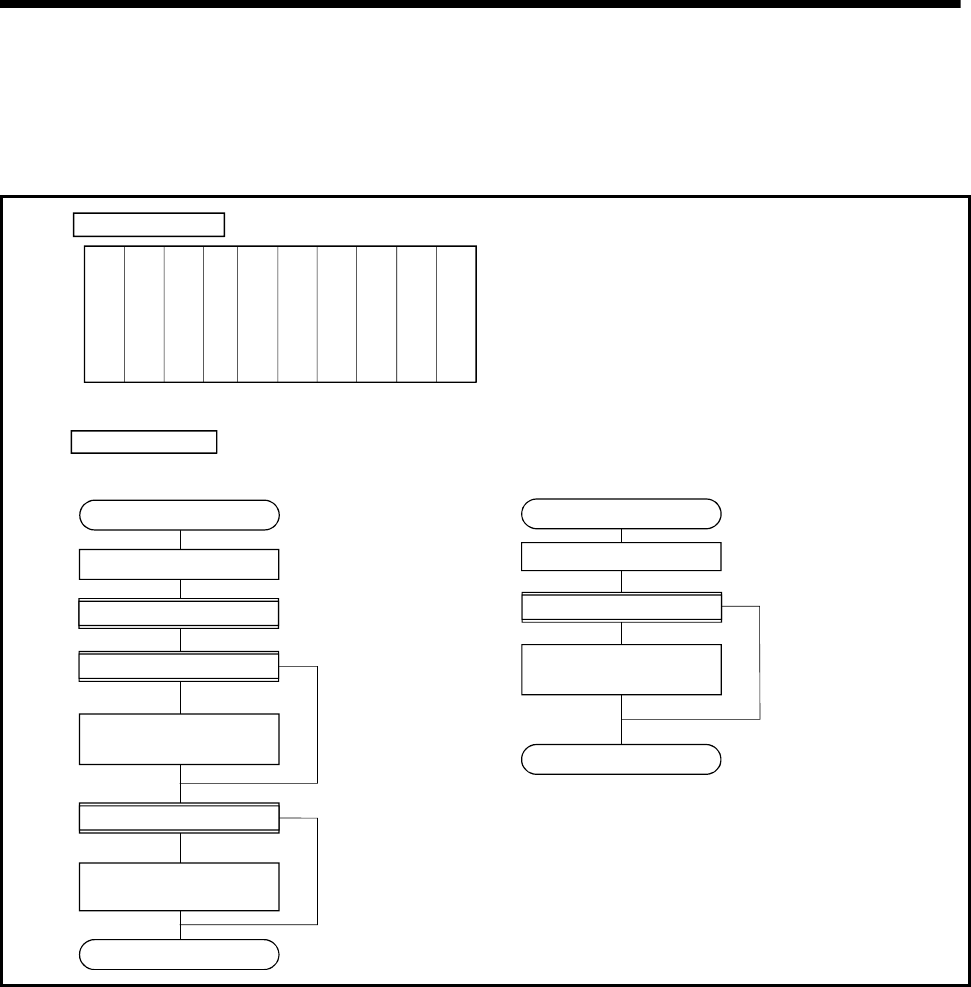
Reading error code
Reading error code (minor error/major error)
Reading error code (servo error)
Reading error code
[F10]
[G10]
[G20]
[F20]
[G30]
[F30]
[F10]
[G10]
[F20]
Error detection signal
ON for axis 1.
Minor error check
for axis 1.
Output to PY000 after
converting the minor
error code of D6 into
BCD code.
Major error check for
axis 1.
Output to PY010 after
converting the major
error of D7 into BCD
code.
Store to "#0".
Error detection signal ON
for axis 1 and the servo
error check for axis 1.
Output to PY020 after
converting the servo
error code for axis 1 into
BCD code.
Q02H
CPU