


















6 -
188
6 POSITIONING CONTROL
6.23 Home Position Return
(1) Use the home position return at the power supply ON and other times where
confirmation of axis is at the machine home position is required.
(2) The following six methods for home position return are shown below.
• Proximity dog type
• Count type
• Data set type
• Dog cradle type
• Stopper type
• Limit switch combined type
(3) The home position return data must be set for each axis to execute the home
position return.
(4) Select the optimal home position return method for the system configuration and
applications with reference to the following.
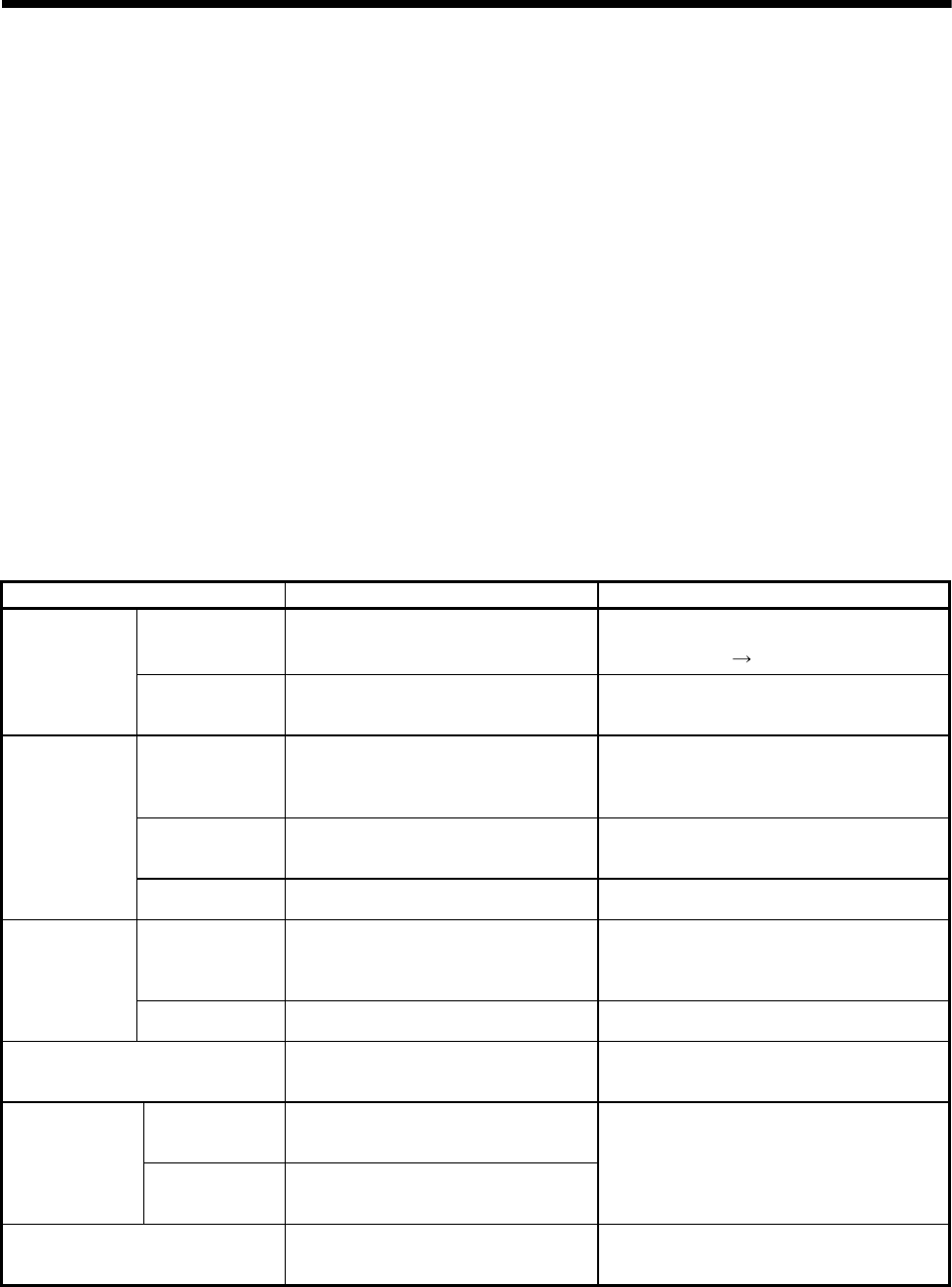
Home position return methods Contents Applications
Proximity dog type 1
• Home position is zero point of servomotor.
• When the proximity dog is ON, it cannot be
started.
• It is used in the system which can surely pass a
zero point from the home position return start to
proximity dog ON
OFF.
Proximity dog type
Proximity dog type 2
• Home position is zero point of servomotor.
• When the proximity dog is ON, it can be
started.
• This method is valid when the stroke range is
short and "proximity dog type 1" cannot be used.
Count type 1
• Home position is zero point of servomotor. • It is used in the system which can surely pass a
zero point from the home position return start to
point of travel distance set as "travel value after
proximity dog ON".
Count type 2
• Zero point is not used in the home position
return.
• This method is used when the proximity dog is
near the stroke end and the stroke range is
narrow.
Count type
(Note)
Count type 3
• Home position is zero point of servomotor. • This method is valid when the stroke range is
short and "count type 1" cannot be used.
Data set type 1
• Home position is command position of
Motion CPU.
• External input signals such as dog signal are not
set in the absolute position system.
• This method is valid for the data set independent
of a deviation counter value.
Data set type
Data set type 2
• Home position is real position of
servomotor.
• External input signals such as dog signal are not
set in the absolute position system.
Dog cradle type
• Home position is zero point of servomotor
immediately after the proximity dog signal
ON.
• It is easy to set the position of proximity dog,
because the proximity dog is set near the
position made to the home position.
Stopper type 1
• Home position is position which stopped
the machine by the stopper.
• Proximity dog is used.
Stopper type
Stopper type 2
• Home position is position which stopped
the machine by the stopper.
• Proximity dog is not used.
• This method is valid to improve home position
accuracy in order to make the home position for
the position which stopped the machine by the
stopper.
Limit switch combined type
• Home position is zero point of servomotor.
• Proximity dog is not used.
• External limit switch is surely used.
• It is used in the system that the proximity dog
signal cannot be used and only external limit
switch can be used.
(Note): If the proximity dog signal of servo amplifier is used, the count type home position return cannot be execute.