



















6 - 6
6 POSITIONING CONTROL
4 axes linear interpolation control is shown below.
[Program example]
Axis 1 travel value: D
1 = 10000 [PLS]
Axis 2 travel value: D
2 = 15000 [PLS]
Axis 3 travel value: D
3 = 5000 [PLS]
Axis 4 travel value: D
4 = 20000 [PLS]
Reference axis speed: V = 7000 [PLS/s]
Reference axis: Axis 4
In this example, since the reference-axis
is axis 4, it is controlled with the positioning
speed specified with axis 4.
The Motion CPU calculates the positioning
speed of other axes using the following
calculation formulas:
V = D / D V1 41Axis 1 positioning speed :
V = D / D V
2
Axis 2 positioning speed :
42
V = D / D V
3
Axis 3 positioning speed :
43
<K 52>
ABS-4
Axis
Axis
Axis
Axis
Reference-axis speed
Reference-axis
1,
2,
3,
4,
10000
15000
5000
20000
70000
4
[PLS]
[PLS]
[PLS]
[PLS]
[PLS/s]
POINTS
(1) Reference-axis speed and positioning speed of other axes
• Be careful that the positioning speed of an axis for a larger travel value than
the reference-axis may exceed the setting reference-axis speed.
(2) Indirect specification of the reference-axis
• The reference-axis can be set indirectly using the word devices D, W and #.
(Refer to Section 5.4.2.)
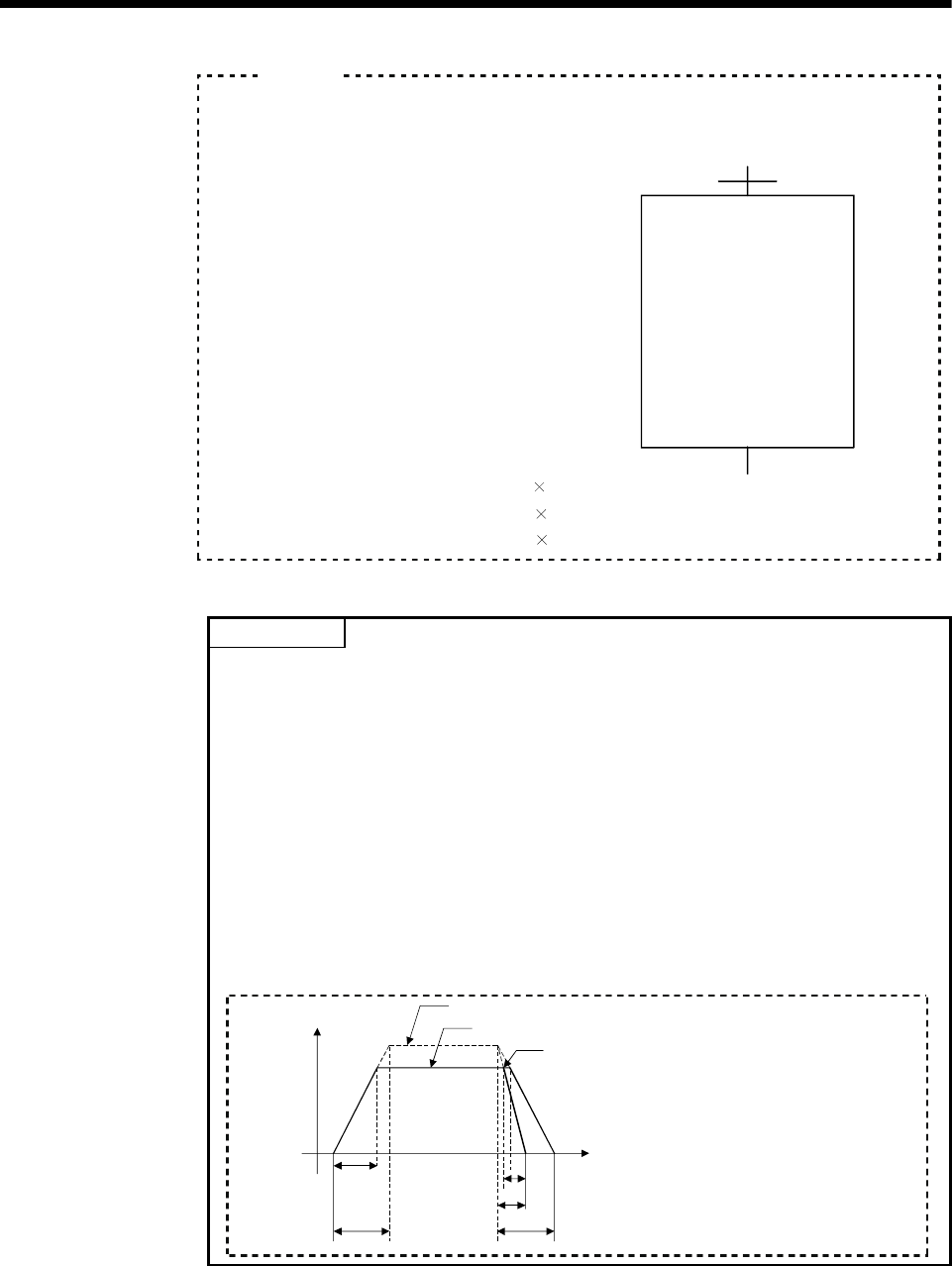
(3) Relationship between speed limit value, acceleration time, deceleration time
and rapid stop deceleration time.
• The real acceleration time, deceleration time and rapid stop deceleration
time are set by the reference-axis speed setting
Speed
Speed limit value
Positioning speed (reference-axis speed)
Rapid stop cause occurrence
Time
1)
2) 4)
6)
5)
3)
1) Real acceleration time
2) Setting acceleration time
3) Real deceleration time
4) Setting deceleration time
5) Real rapid stop deceleration time
6) Set rapid stop deceleration time
Exam
p
le