



















APP - 19
A
PPENDICES
(3) Absolute position system errors (1200 to 1299)
These errors are detected at the absolute position system.
The error codes, causes, processing and corrective actions are shown in Table
1.10.
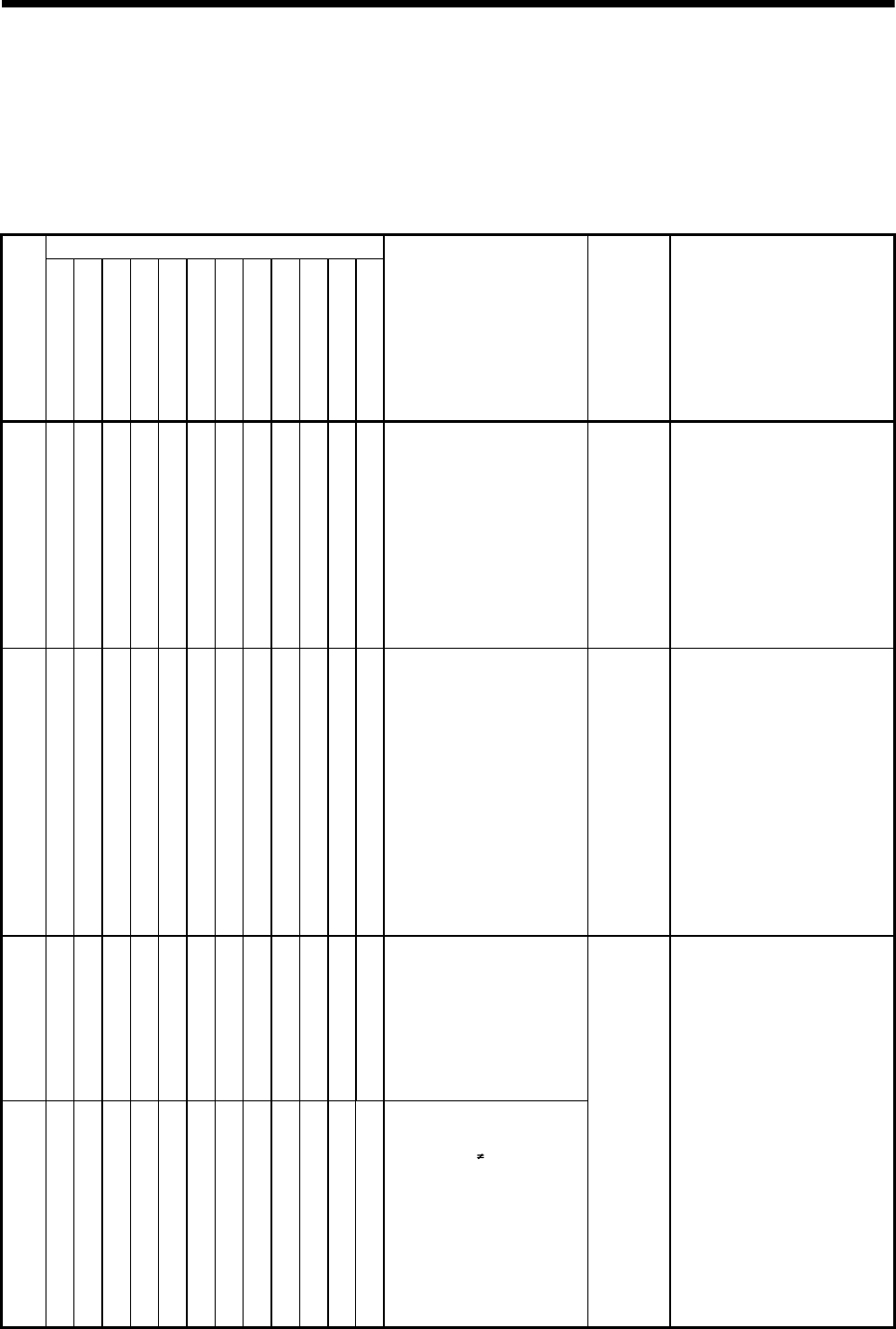
Table 1.10 Absolute position system error (1200 to 1299) list
Control mode
Error
code
Positioning
Fixed-pitch feed
Speed
Speed/position switching
Speed switching
Constant-speed
JOG
Manual pulse generator
Home position return
Position follow-up control
OSC
Speed control with
fixed position stop
Error cause
Error
processing
Corrective action
1201
• A sum check error occurred
with the backup data in the
controller at the turning on
servo amplifier power
supply.
• Home position return was
not performed.
• CPU module battery error.
• Home position return started
but did not complete
normally.
Home
position
return
request ON
• Check the battery and execute
a home position return.
1202
• A communication error
between the servo amplifier
and encoder occurred at the
turning on servo amplifier
power supply.
Home
position
return
request ON,
servo error
[2016] set.
(Fully
closed loop
control
servo
amplifier
use: Servo
error [2070]
is set.)
• Check the motor and encoder
cables and execute a home
position return again.
1203
• The amount of change in
encoder current value is
excessive during operation.
A continual check is
performed (both of servo
ON and OFF states) after
the servo amplifier power
has been turned ON.
1204
• The following expression
holds: "Encoder current
value [PLS]
feedback
current value [PLS]
(encoder effective bit
number)" during operation.
A continual check is
performed (both of servo
ON and OFF states) after
the servo amplifier power
has been turned on.
Home
position
return
request ON
• Check the motor and encoder
cables.