



















6 - 20
6 POSITIONING CONTROL
Control using INC-1 (Incremental data method)
(1) Positioning control of the specified travel value from the current stop position
address is executed.
(2) The travel direction is set by the sign (+/ -) of the travel value, as follows:
• Positive travel value .............Positioning control to forward direction
(Address Increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
Current stop address
Reverse
direction
Forward
direction
Travel direction for
negative travel value
Travel direction for
positive travel value
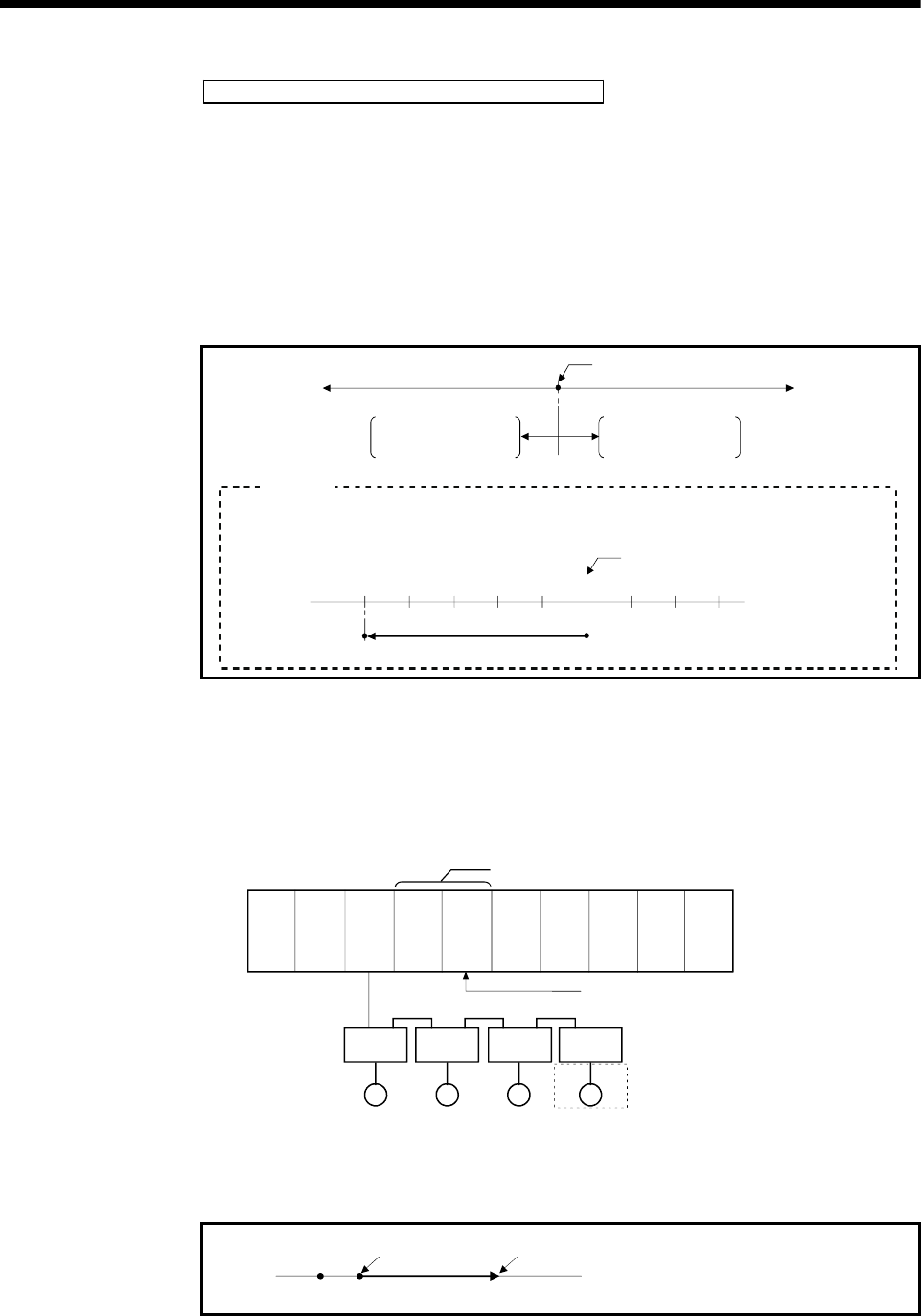
When the current stop address is -3000, and the travel value is -5000.
Current stop address
-8000 -3000
-2000 -1000 0
Home position
Travel value = -5000
Fig.6.2 Positioning using incremental data method
[Program]
Servo program No. 0 for positioning control is shown as the following conditions.
(1) System configuration
1 axis linear positioning control of Axis 4.
Q61P Q02H
CPU
Q172H
CPU
Q172
LX
QX41
Positioning start command (PX000)
AMP
MM MM
Motion CPU control module
Axis
4
Axis
1
Axis
2
Axis
3
AMP
AMP AMP
(2) Positioning operation details
Positioning using the servo program No.0 is shown below.
In this example, Axis 4 is used in servo program No.0.
Home position
Current stop address Positioning address using the servo program No.0
0 1000 80000
Example