












5 - 16
5 SERVO PROGRAMS FOR POSITIONING CONTROL
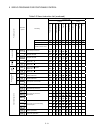
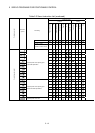
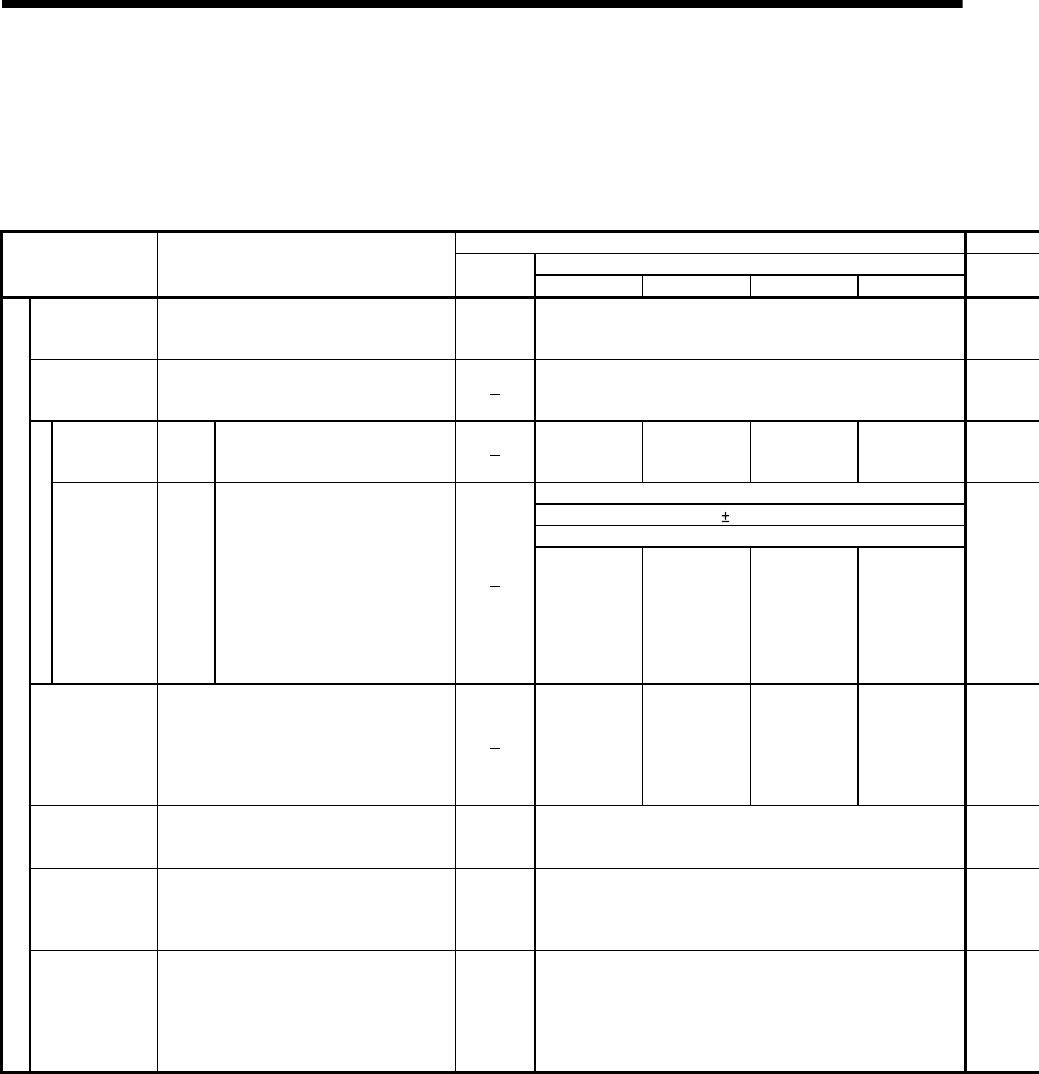
5.3 Positioning Data
The positioning data set in the servo programs is shown in Table 5.3.
Table 5.3 Positioning data
Setting value using a peripheral device
Setting range
Name Explanation
Default
value
mm inch degree PLS
Parameter block
No.
• Set based on which parameter block
deceleration processing at the acceieration/
deceleration processing and STOP input.
1 1 to 64
Axis
• Set the starting axis.
• It becomes the interpolation starting axis No.
at the interpolation.
1 to 32
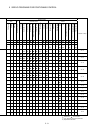
Absolute data
method
Address
Set the positioning address as an
absolute method with an absolute
address.
-214748364.8
to 214748364.7
[
µ
m]
-21474.83648
to
21474.83647
0 to 359.99999
-2147483648
to
2147483647
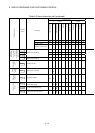
Expect for the speed/position switching control
0 to 2147483647
Speed/position switching control
Address/travel value
Incremental
data method
Travel
value
Set the positioning address as an
incremental data method with a travel
value. Travel direction is indicated by
the sign. Only positive settings can
be made at the speed/position
control.
Positive : Forward rotation
(address increase direction)
Negative: Reverse rotation
(address decrease direction)
0 to
214748364.7
[
µ
m]
0 to
21474.83647
0 to
21474.83647
0 to
2147483647
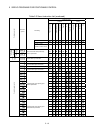
Command speed
• Sets the positioning speed.
• Units for speed are the "control units" set in
the parameter block.
• It becomes the combined-speed/long-axis
reference speed/reference axis speed at the
interpolation starting. (PTP control only)
0.01 to
6000000.00
[mm/min]
0.001 to
600000.000
[inch/min]
0.001 to
2147483.647
[degree/min]
(Note-5)
1 to
2147483647
[PLS/s]
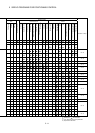
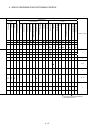
Dwell time
• Set the time until outputs the positioning
complete signal (M2401+20n) after
positioning to positioning address.
0[ms] 0 to 5000[ms]
M-code
• Set the M-code.
• Set for each point at the speed-switching
control and constant-speed control.
• Updated it at the start or specified point.
0 0 to 32767
Common Settings
Torque limit value
• Set the torque limit value.
• The torque limit is perfomed based on the
parameter block data at the start. The speed-
switching control can be set for each point
and the setting torque limit values can be
performed with the specified point.
Torque limit
setting
valued [%]
in the
parameter
block
1 to 1000[%]