



















6 - 103
6 POSITIONING CONTROL
6.15.2 Re-starting after stop during control
Re-starting (continuing) after stop with stop command during speed/position switching
control is executed.
Re-starting uses VPSTART servo instruction.
Items are set in peripheral devices
Common Arc Parameter block Others
Servo
instruction
Positioning
method
Number of
control axes
Parameter block No.
Axis
Address/travel value
Command s
p
eed
Dwell time
M-code
Tor
q
ue limit value
Auxiliar
y
p
oint
Radius
Central
p
oint
Control unit
S
p
eed limit value
Acceleration time
Deceleration time
Ra
p
id sto
p
deceleration time
Tor
q
ue limit value
Deceleration
p
rocessin
g
on sto
p
in
p
ut
Allowable error ran
g
e for circular inter
p
olation
S-curve ratio
Cancel
WAIT-ON/OFF
Speed change
VPSTART
: Must be set
: Set if required
[Control details]
(1) The continuous control after stop during speed control is executed, after speed/
position switching control start.
(2) Re-starting using the VPSTART is effective by stop during speed control or
position control.
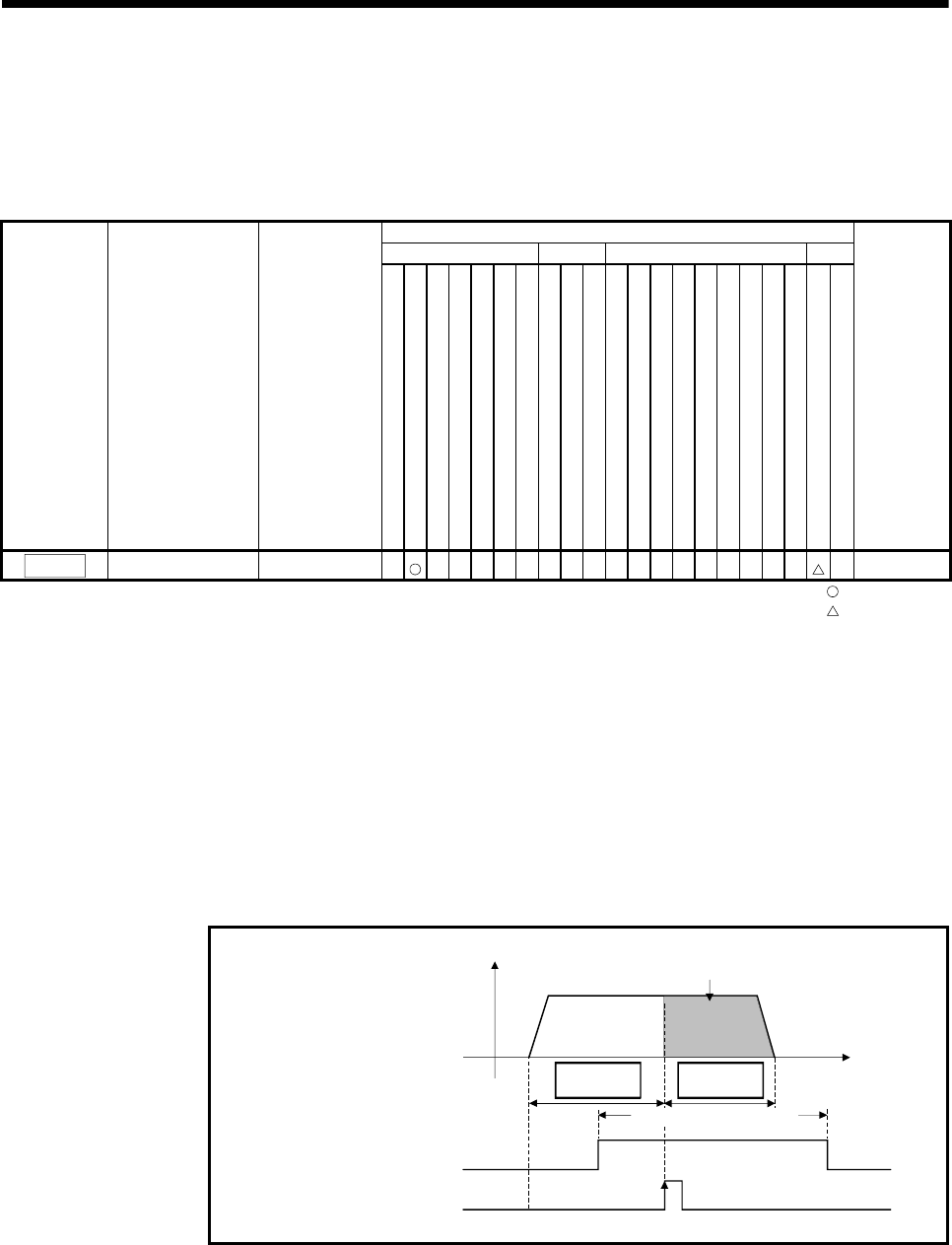
(a) Re-starts with the speed control at the stop during speed control, then
switches to position control by turning on the CHANGE signal.
• The control contents after re-starting are same as the speed/position
switching control. Refer to Section "6.15.1 Speed/position switching
control start".
V
ON
t
Position
controlling
Speed
controlling
Setting travel value
OFF
Speed/position
switching enable command
(M3205+20n)
CHANGE signal valid
CHANGE signal input
from external source
Fig. 6.27 Re-starting during speed control