



















APP - 12
A
PPENDICES
(3) Positioning control errors (200 to 299)
These are errors detected during the positioning control.
The error codes, causes, processing and corrective actions are shown in Table
1.5.
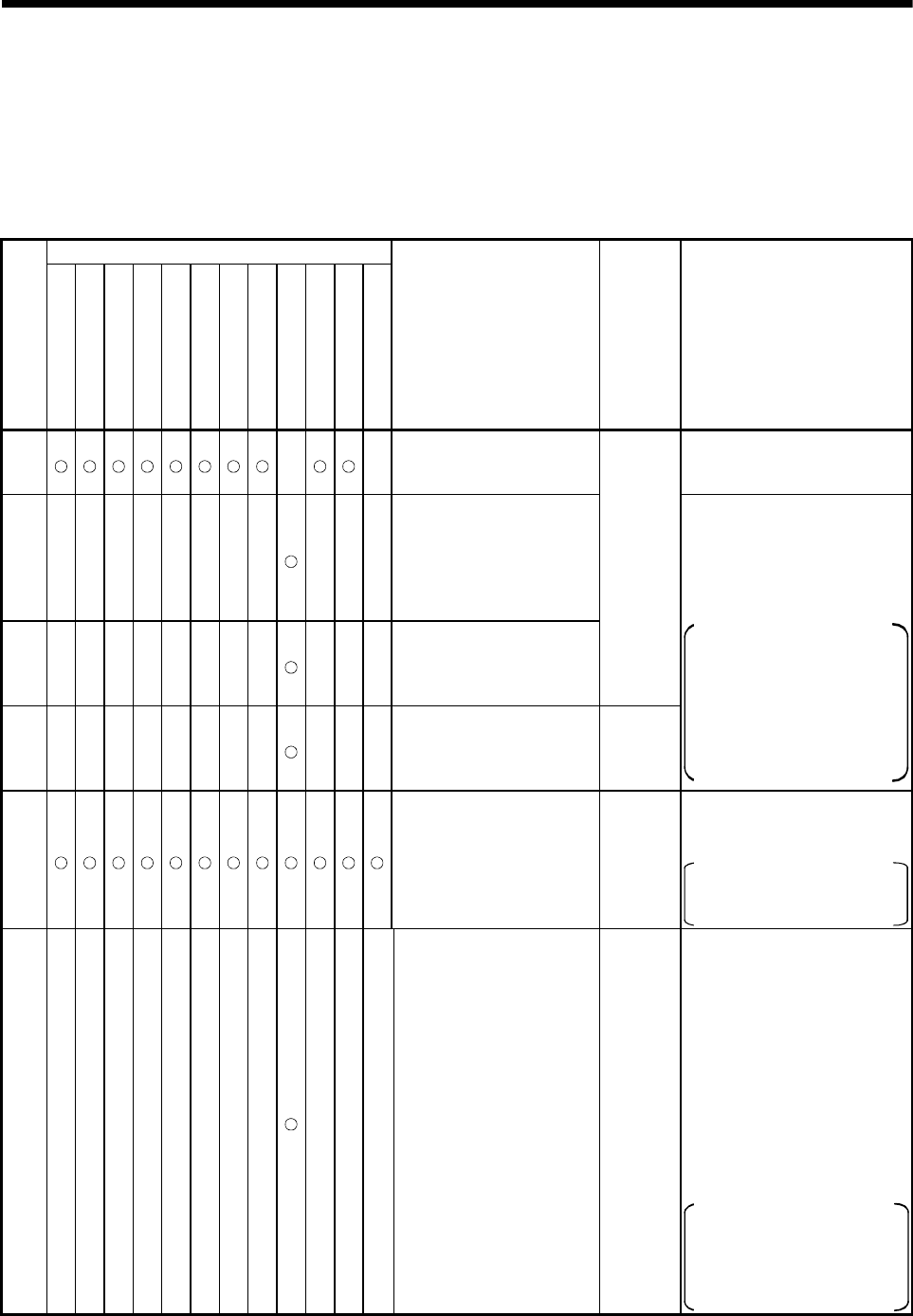
Table 1.5 Positioning control error (200 to 299) list
Control mode
Error
code
Positioning
Fixed-pitch feed
Speed
Speed/position switching
Speed switching
Constant-speed
JOG
Manual pulse generator
Home position return
Position follow-up control
OSC
Speed control with
fixed position stop
Error cause
Error
processing
Corrective action
200
• The PLC ready flag (M2000)
turned off during the control
by the servo program.
• Turn the PLC ready flag
(M2000) on after all axes have
stopped.
201
• The PLC ready flag (M2000)
turned off during the home
position return.
• Perform the home position
return again after turning the
PLC ready flag (M2000) on or
turning the stop command
(M3200+20n) or rapid stop
command (M3201+20n) off.
202
• The stop command
(M3200+20n) turned on
during the home position
return.
Decelera-
tion stop
203
• The rapid stop command
(M3201+20n) turned on
during the home position
return.
Rapid stop
Return to a point before the
proximity dog signal ON
using JOG operation or
positioning operation, and
perform the home position
return again in the proximity
dog type.
• Turn the PLC ready flag
(M2000) off to on after all axes
have stopped.
204
• The PLC ready flag (M2000)
turned off to on again during
deceleration by turning off
the PLC ready flag (M2000).
No
operation
Turn the PLC ready flag
(M2000) off to on during
deceleration is "no operation".
• Return to a point before the
proximity dog signal ON using
JOG operation or positioning
operation, and perform the
home position return again in
the proximity dog type.
• Return to a point before the
proximity dog signal ON using
JOG operation or positioning
operation, and perform the
home position return again,
when the proximity dog signal
turns off in the count type.
206
• All axes rapid stop ([Back
Space] key input) is
executed using the test
mode of a peripheral device
during the home position
return.
Rapid stop
Perform the home position
return operation again,
when the proximity dog
signal turns on in the count
type.