



















6 - 63
6 POSITIONING CONTROL
(3) Set the command speed with the combined-speed for 2 axes circular interpolation
axis.
(4) The command speed unit is specified in the parameter block.
(5) Set the number of pitches within the range of 0 to 999. If it is set outside the
setting range, the servo program error [28] occurs and operation does not start.
(6) All of the circular interpolation axis, linear axis end point relative address,
command speed, radius (2 word data above) and number of pitches (1 word data)
are set indirectly by D, W and #.
[Program]
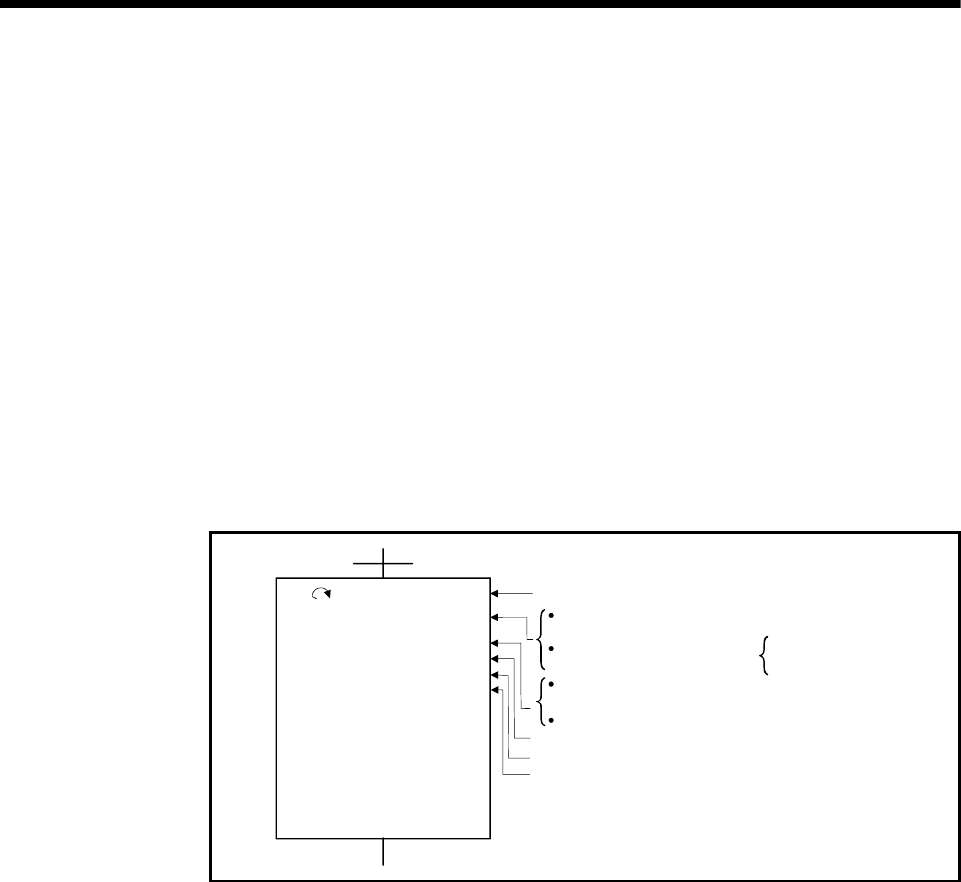
(1) Servo program
Servo program No.53 for incremental radius-specified helical interpolation control
is shown below.
<K 53>
INH
Axis
Axis
Linear axis
Speed
Number of pitches
Radius
1,
2,
3,
100000
50000
25000
1000
100
60000
Axis for the circular . . . . . . . .
interpolation
End point relative address of the linear axis . . . 25000
Positioning speed . . . 1000
Number of pitches . . . . . .
Radius on a circular interpolation plane . . . . . . . . . 60000
Axis 1 . . . 100000
Axis 2 . . . . 50000
Linear axis for the circular . . . . . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point relative address of . . .
the circular interpolation axis
100
Axis 1, Axis 2
Incremental radius specified-circular helical interpolation
(Note): Example of the Motion SFC program for positioning control is shown next page.