



















6 -
205
6 POSITIONING CONTROL
6.23.5 Home position return by the count type 2
(1) Count type 2
After the proximity dog ON, the position which traveled the specified distance
(travel value after proximity dog ON) is home position in this method.
It is not related for zero point pass or not pass. (If the proximity dog signal of
servo amplifier is used, the count type 2 home position return cannot be
executed.)
A count type 2 is effective method when a zero point signal cannot be taken.
(However, dispersions will occur to the stop position at the home position return
compared with the count type 1.)
The travel value after proximity dog ON is set in the home position return data
(Refer to Section 6.23.1).
(2) Home position return by the count type 2
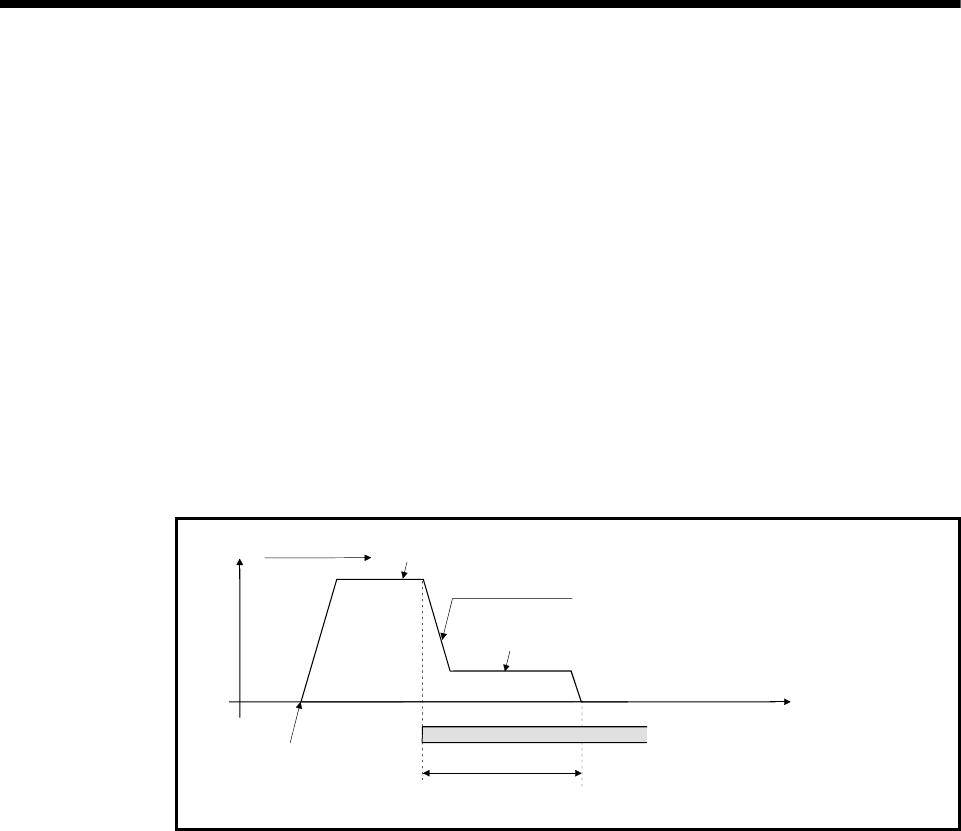
Operation of home position return by count type 2 is shown below.
V
Home position
return direction
t
Home position
return speed
Creep speed
Home position
return start
Proximity dog
The travel value in this range is stored in the
monitor register "travel value after proximity dog
ON".
(Note): "Home position return re-travel value" = 0
(Note): After the proximity dog ON, a position
which traveled the distance "travel
value after proximity dog ON" of the
home position return data is home
position.
Fig. 6.36 Home position return operation by the count type 2
(3) Home position return execution
Home position return by the count type 2 is executed using the servo program in
Section 6.23.16.
(4) Cautions
(a) Home position return and continuously start of home position return are also
possible in the proximity dog ON in the count type 2.
When the home position return and continuously start of home position
return are executed in the proximity dog ON, the home position return is
executed after return the axis once to position of the proximity dog OFF.
(b) When the "travel value after proximity dog ON" is less than the deceleration
distance from "home position return speed" to "creep speed", a minor error
"an overrun occurred because the setting travel value is less than the
deceleration distance at the proximity dog signal input during home position
return of count type." (error code: 209) will occur and deceleration stop is
made.
(c) Command position is the home position.
(d) If in-position signal (M2402+20n) does not turn ON, home position return is
not ended.