











5 - 5
5 SERVO PROGRAMS FOR POSITIONING CONTROL
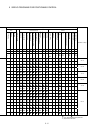
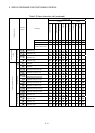
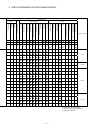
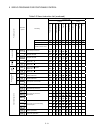
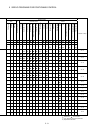
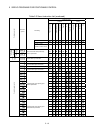
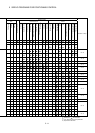
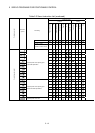
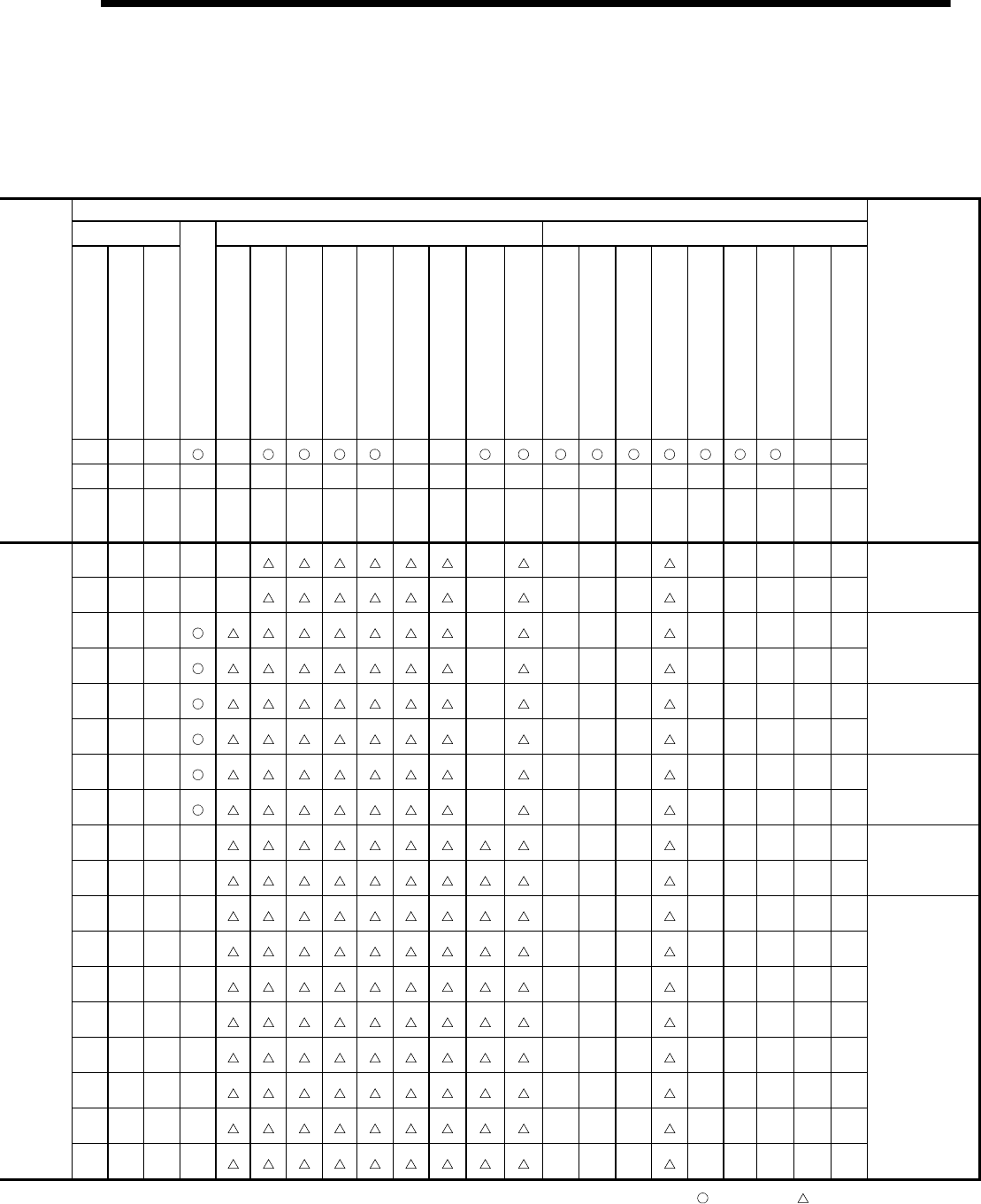
Positioning data
OSC
*
1
Parameter block Others
Starting angle
Amplitude
Frequency
Reference axis No.
Control unit
Speed limit value
Acceleration time
Deceleration time
Rapid stop deceleration time
Torque limit value
Deceleration processing
at stop input
Allowable error range for circular
interpolation
S-curve ratio
Repeat condition
Program No.
Command speed
(
constant speed
)
Cancel
Skip
FIN acceleration/deceleration
WAIT-ON/OFF
Fixed position stop acceleration
/deceleration time
Fixed position stop
— — —
—
— —
— —
1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 2 2 2 1 2 1 1
2 2 2 1 1 2 1 1 1 1 1 2 1
*2
1/
1
(
B
)
— 2
*2
1(B)
*2
1(B)
1
*2
1(B)
1
*2
1(B)
Number of steps
4 to 17
5 to 20
7 to 21
8 to 22
7 to 22
6 to 21
: Must be set. : Set if required.
*1 : Only reference axis speed specification.
*2 : (B) indicates a bit device.