



















6 - 10
6 POSITIONING CONTROL
(3) Positioning control
Positioning control method in the control unit "degree" is shown below.
(a) Absolute data method (ABS
instructions)
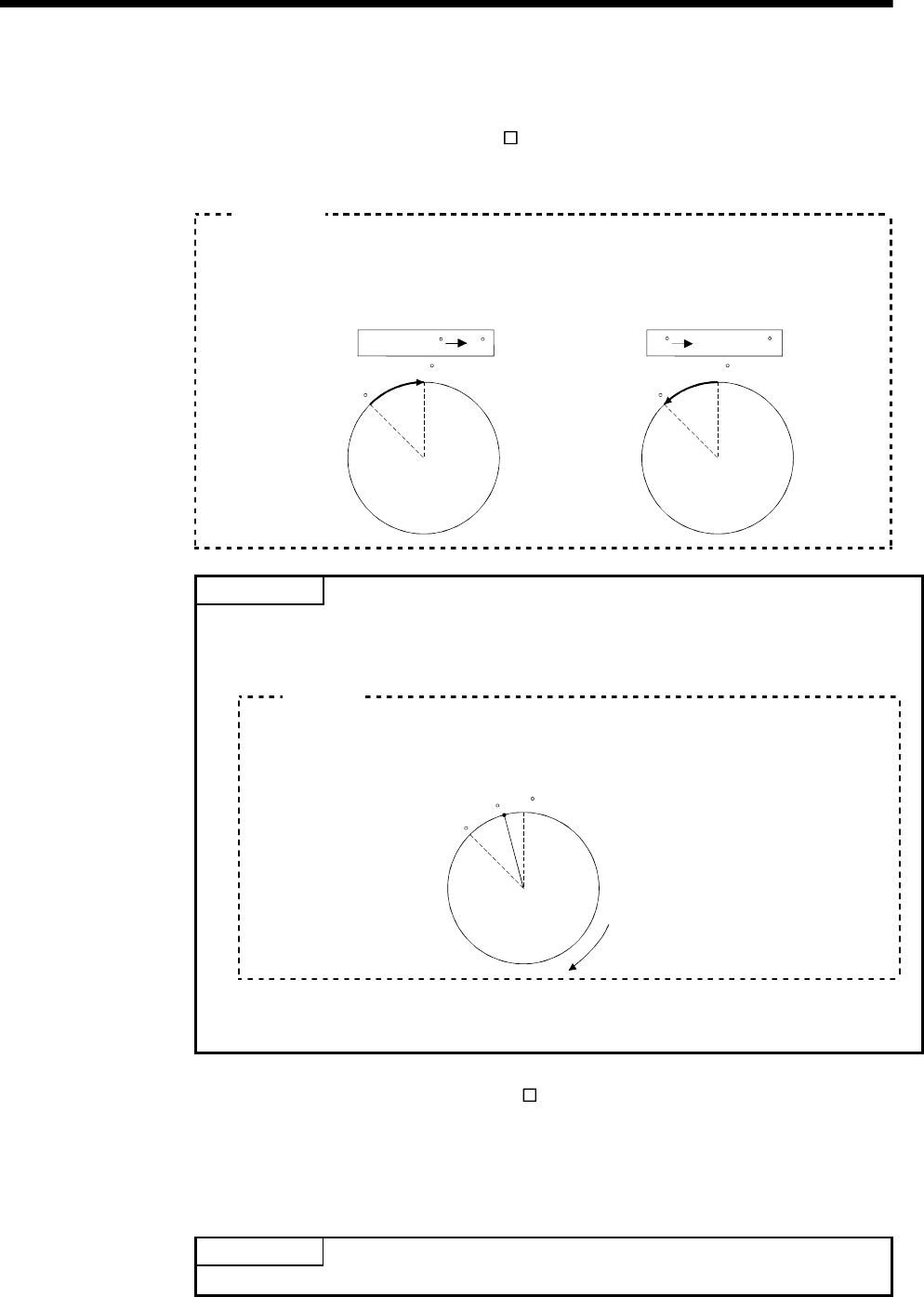
Positioning in a near direction to the specified address is performed based
on the current value.
(1) Positioning is executed in a clockwise direction to travel from the current value
of 315.00000°to 0°.
(2) Positioning is executed in a counter clockwise direction to travel from the
current value of 0° to 315.00000°.
315.00000 315.00000
00
0 315.00000315.00000 0
POINTS
(1) The positioning direction of absolute data method is set a clockwise/counter
clockwise direction by the setting method of stroke limit range, positioning in the
shortest direction may not be possible.
Travel from the current value 0° to 315.00000°must be clockwise positioning
if the lower stroke limit value is set to 0°and the upper limit value is set to
345.00000°.
315.00000
0
345.00000
Clockwise positioning
(2) Set the positioning address within the range of 0° to 360°.
Use the incremental data method for positioning of one revolution or more.
(b) Incremental data method (INC
instructions)
Positioning by the specified travel value to the specified direction.
The travel direction is set by the sign of the travel value, as follows:
1) Positive travel value ................Clockwise rotation
2) Negative travel value...............Counter clockwise rotation
POINT
Positioning of 360° or more can be executed in the incremental data method.
Examples
Exam
p
le