



















6 -
201
6 POSITIONING CONTROL
6.23.3 Home position return by the proximity dog type 2
(1) Proximity dog type 2
Zero point position after proximity dog ON to OFF is home position in this
method.
When it passed (zero pass signal: M2406+20n ON) the zero point from home
position return start to deceleration stop by proximity dog ON to OFF, operation
for "proximity dog type 2" is the same as "proximity dog type 1". (Refer to Section
6.23.2)
When it does not pass (zero pass signal: M2406+20n OFF) the zero point from
home position return start to deceleration stop by proximity dog ON to OFF, it
moves to home position return direction after the servomotor is rotated one
revolution to reverse direction and it passed the zero point, and the first zero
point position is set as home position after proximity dog ON to OFF.
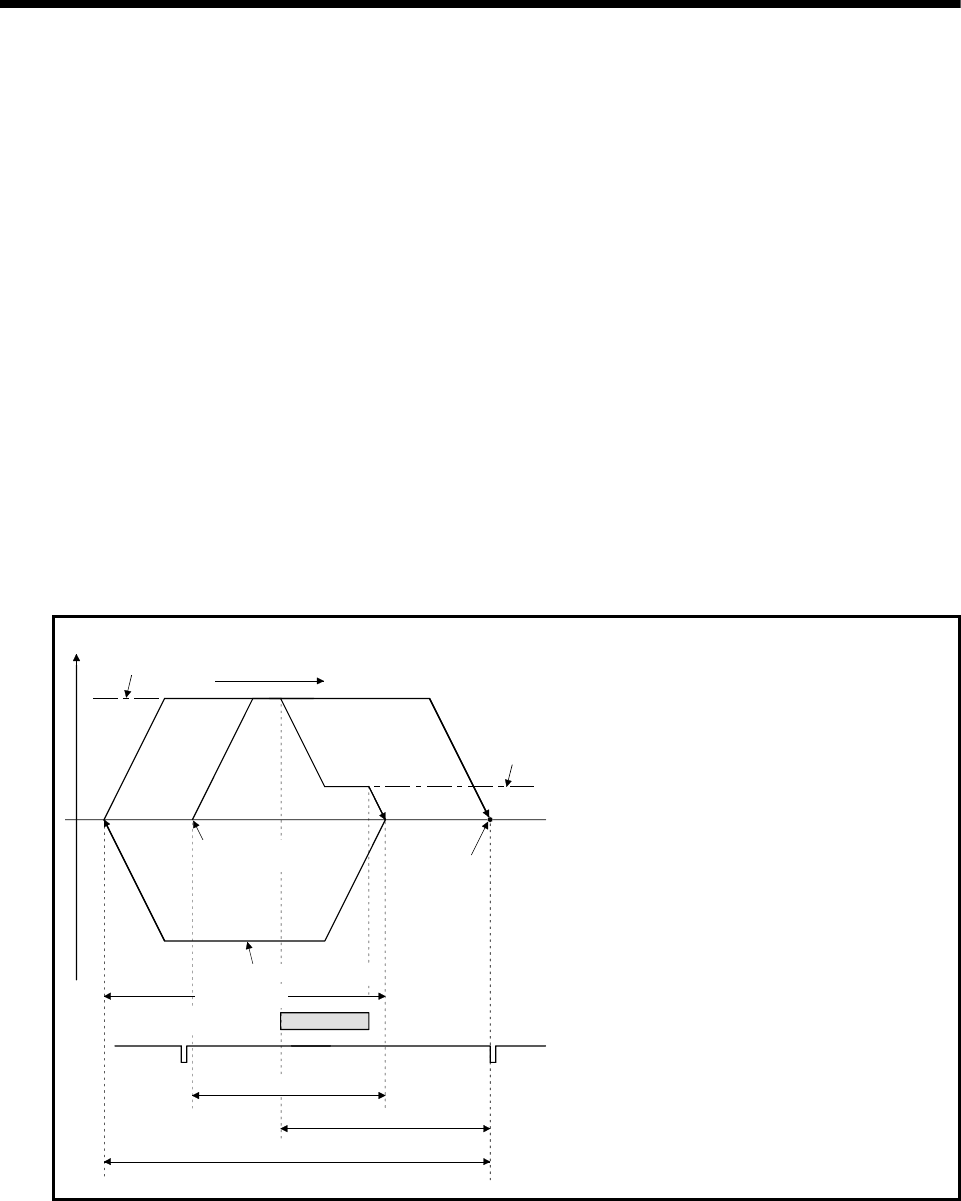
(2) Home position return by the proximity dog type 2
Operation of home position return by proximity dog type 2 for not passing the
zero point from home position return start to deceleration stop by proximity dog
ON to OFF is shown below.
V
1) It travels to preset direction of home position
return with the home position return speed.
2) A deceleration is made to the creep speed by
the proximity dog ON, after that, it travels
with
the creep speed. (If the proximity dog turns
OFF during a deceleration, a deceleration
stop is made and the operation for 4) starts.)
3) A deceleration stop is made by the proximity
dog OFF.
4) After a deceleration stop, it travels for one
revolution of servomotor to reverse direction
of home position return with the home
position return speed.
5) It travels to direction of home position return
with the home position return speed, the
home position return ends with first zero point
after the proximity dog ON to OFF. (At this
time, a deceleration to the creep speed is not
made with the proximity dog OFF to ON .
And
if the zero point is not passed because of
droop pulses for processing of 4) and 5), a
minor error "ZCT not set" (error code: 120)
will occur, a deceleration stop is made and
the home position return does not end
Home position
return direction
3)
2)
4)
1)
5)
Home position
return speed
Creep speed
Home position
Home position return speed
Zero point
The travel value in this range is stored in the monitor
register "travel value after proximity dog ON".
The travel value in this range is stored in the monitor
register "home position return re-travel value".
Zero point no passing
Home position
return start
1 revolution
Proximity dog
Fig. 6.34 Home position return operation by the proximity dog type 2
(zero point no passing)
(3) Home position return execution
Home position return by the proximity dog type 2 is executed using the servo
program in Section 6.23.16.