



















6 - 158
6 POSITIONING CONTROL
POINT
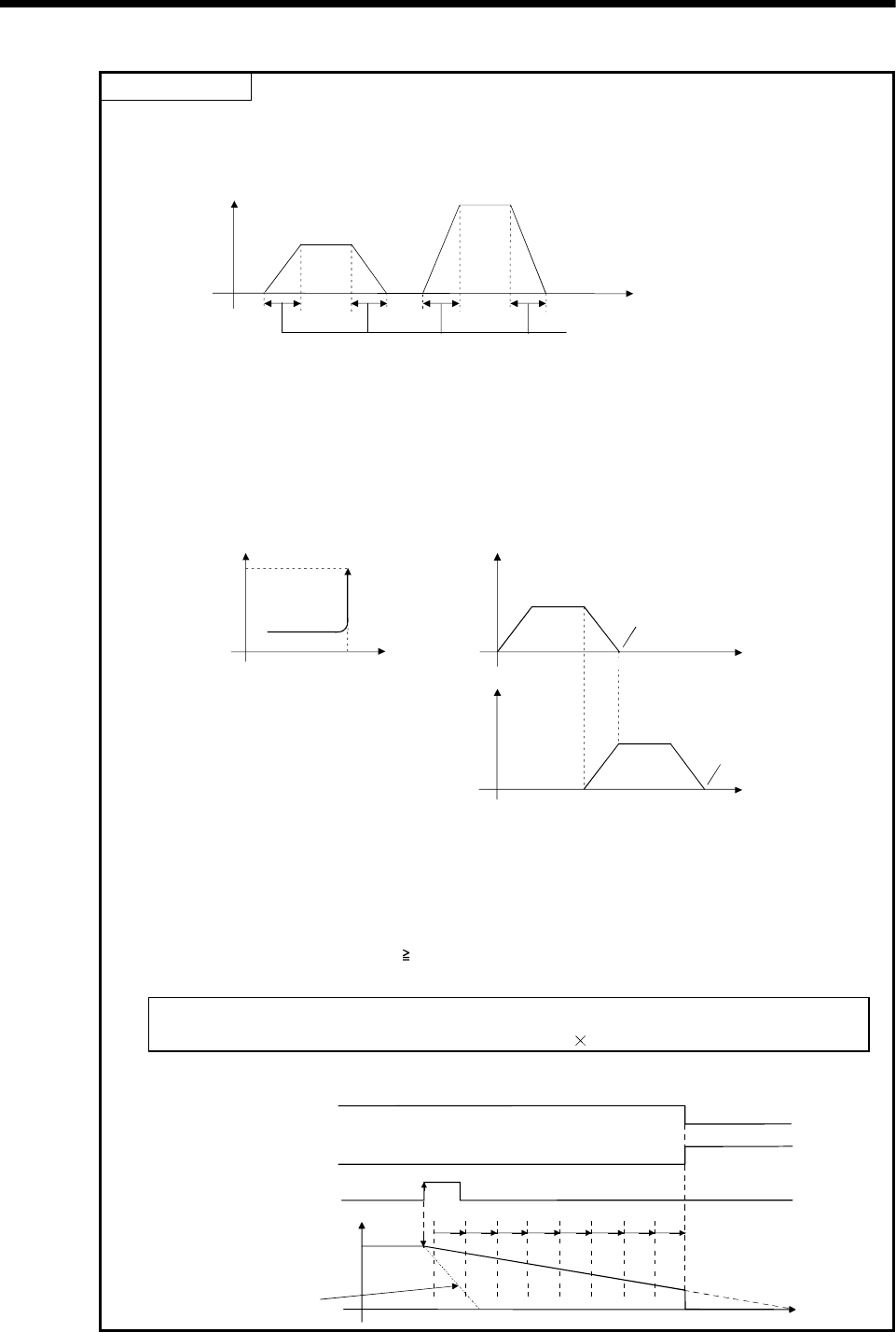
(1) The fixed acceleration/deceleration time method is acceleration/deceleration processing
that the time which acceleration/deceleration takes is fixed, even if the command speed
differs.
A
cceleration/deceleration time is fixed
V
t
(a) The following processing and parameters are invalid in the fixed
acceleration/deceleration time method.
• Rapid stop acceleration/deceleration time in parameter block
• Completion point specification method for speed change point
• S-curve acceleration/deceleration
(b) The speed processing for each axis is as shown below in positioning operation
(constant-speed) as shown in the following figure.
Y
Axis 1
Axis 2
Address Ax
Positioning operation
X
Ax
Ay
Address Ay
t
V
V
Axis 1
Axis 2
Ay
t
Constant-speed control processing
of each axis
Ax
(2) When the rapid stop command is executed by the setting "deceleration time < rapid stop
deceleration time
" during constant-speed control, the point data currently executed in the middle
of deceleration, and the positioning may be completed suddenly as a speed
"0".
In the case of,
"deceleration time rapid stop deceleration time", the above operation is not
executed.
Travel value by the point data currently executed at the rapid stop command
(Up to 9 points) < speed at rapid stop command input
rapid stop deceleration time/2
[Operation pattern]
Positioning complete
signal
Rapid stop command
Deceleration speed at
the normal stop
Combined-speed
OFF
ON
OFF
OFF
ON
Start accept flag
8)7)6)5)4)3)2)1)
ON