












APP - 31
A
PPENDICES
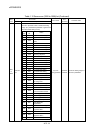
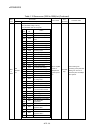
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error cause Error
code
Name Description
Error check
Error
processing
Corrective action
• Ambient temperature of servomotor is
over 40[°C] (104[°F]).
• Review environment so that
ambient temperature is 0 to
49[°C] (32 to 104[°F]).
• Servomotor is overloaded. • Reduce load.
• Review operation pattern.
• Use servomotor that provides
larger output.
2142
(AL.E2)
Servo motor
overheat
warning
• Thermistor in encoder is faulty.
Operation
continues
• Replace the servomotor.
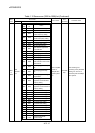
2143
(AL.E3)
Absolute
position counter
warning
• Absolute position encoder pulses faulty. Operation
continues
Home
position
return
request
ON
• Take noise suppression
measures.
• Replace the servomotor.
• Execute the home position return
after measures.
2146
(AL.E6)
Servo forced
stop warning
• Servo amplifier are forced stop state.
(Servo amplifier input signal EM1 is
OFF.)
• Ensure safety and deactivate
forced stop.
2147
(AL.E7)
Controller
forced stop
warning
• A forced stop signal is input from the
Motion CPU
Immediate
stop
• Ensure safety and deactivate
forced stop.
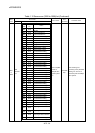
• Cooling fan life expiration • Replace the cooling fan of servo
amplifier.
• Replace the servo amplifier.
2148
(AL.E8)
Cooling fan
speed reduction
warning
• The power supply of the cooling fan is
broken.
• Replace the cooling fan of servo
amplifier.
2149
(AL.E9)
Main circuit off
warning
• Servo-on signal was turned on with main
circuit power off.
• Switch on the main circuit power.
2152
(AL.EC)
Overload
warning 2
• During a stop, the status in which a
current flew intensively in any of the U, V
and W phases of the servomotor
occurred repeatedly, exceeding the
warning level.
• Reduce the positioning frequency
at the specific positioning
address.
• Reduce the load.
• Replace the servo amplifier/
servomotor with the one of larger
capacity.
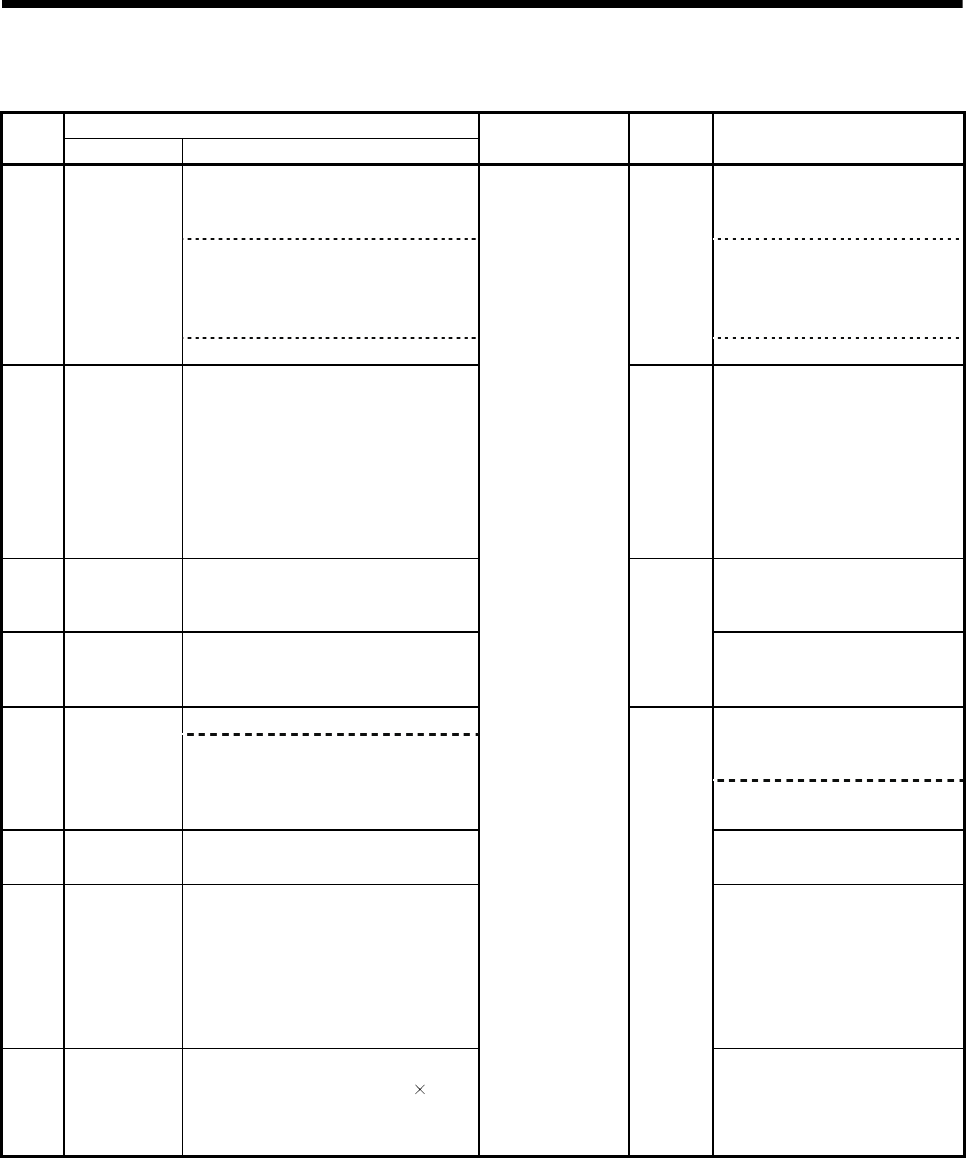
2153
(AL.ED)
Output watt
excess warning
• Continuous operation was performed
with the output wattage (speed
torque) of the servomotor exceeding
150[%] of the rated output.
Any time during
operation
Operation
continues
• Reduce the servomotor speed.
• Reduce the load.