



















6 -
214
6 POSITIONING CONTROL
6.23.10 Home position return by the stopper type 1
(1) Stopper type 1
Position of stopper is home position in this method.
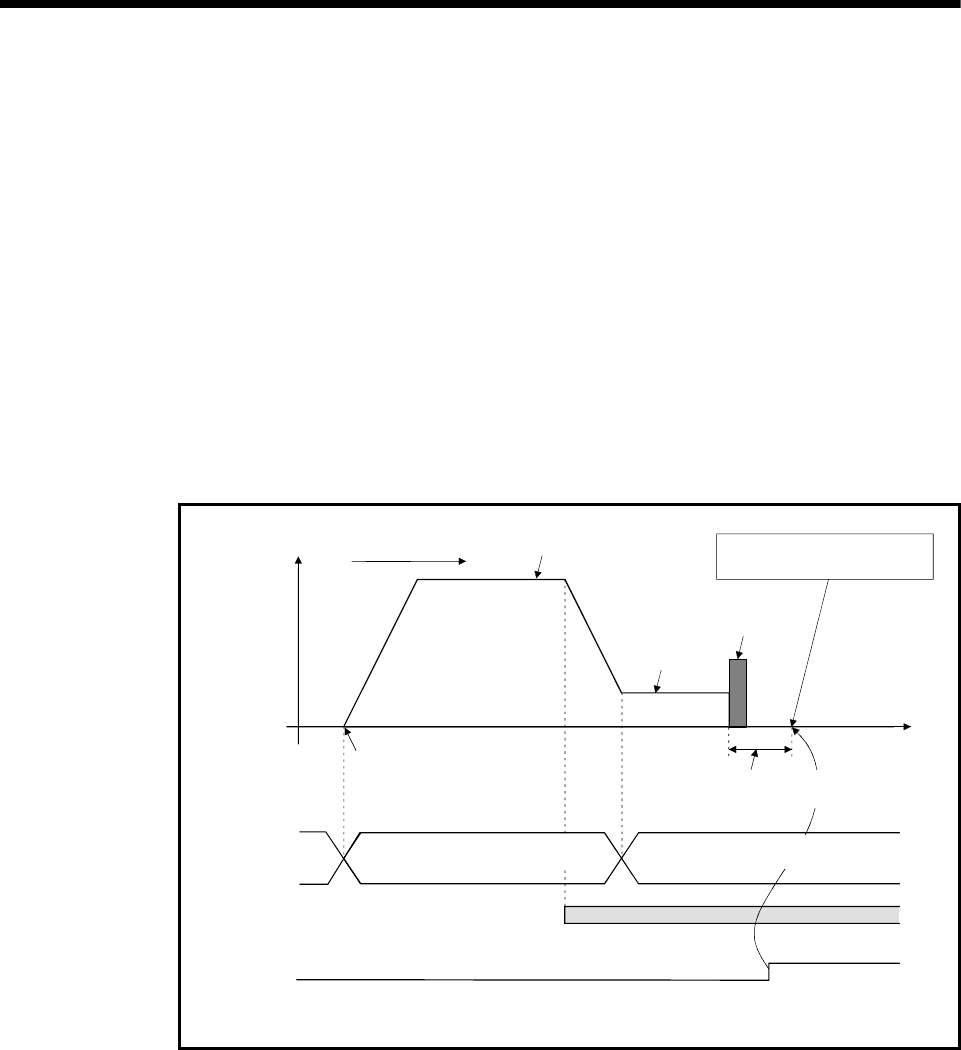
It travels to the direction set in the "home position return direction" with the "home
position return speed", after a deceleration starts by proximity dog OFF to ON
and it presses against the stopper and makes to stop with the torque limit value
set in the "torque limit value at the creep speed" and "creep speed" of home
position return data. Real position of servomotor at the time of detection for
turning the torque limiting signal OFF to ON is home position.
Torque limit value after reaching creep speed is set in the "torque limit value at
the creep speed" of home position return data.
(2) Home position return by the stopper type 1
Operation of home position return by the stopper type 1 is shown below.
V
t
Home position
return direction
Home position
return speed
Creep speed
Home position
return start
Proximity dog
Torque limit
value
Torque limiting
signal
(M2416+20n)
Stopper
(Note): "Travel value after proximity dog ON" storage register becomes "0" at the
home position return start.
Real position of servomotor
at this point is home position.
ON
OFF
Time which stops rotation of
servomotors forcibly by the
stopper
Home position return data
"torque limit value at the
creep speed"
Torque limit value of
parameter block at the home
position return
Fig. 6.41 Home position return operation by the stopper type 1
(3) Home position return execution
Home position return by the stopper type 1 is executed using the servo program
in Section 6.23.16.