


















2 - 3
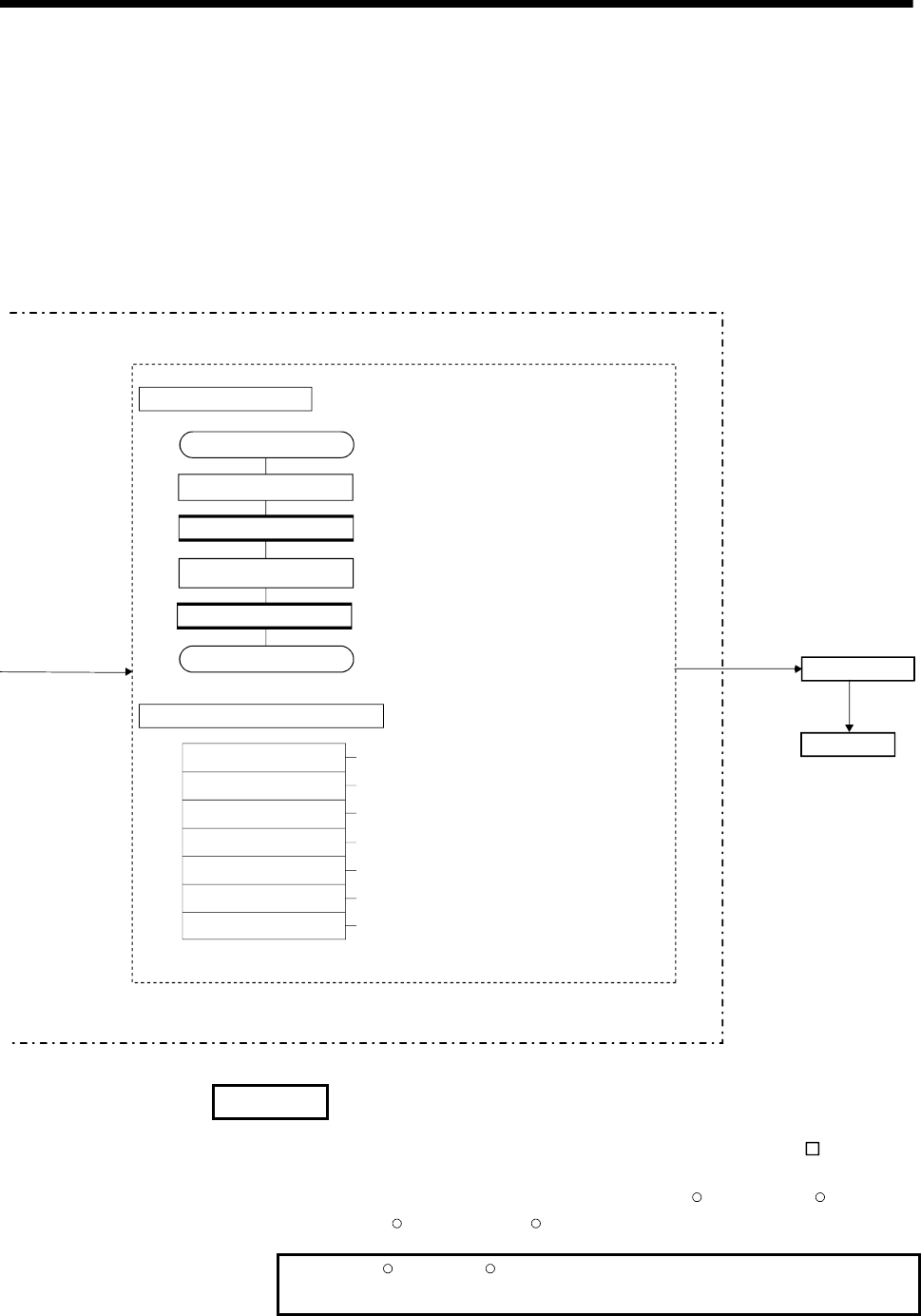
2 POSITIONING CONTROL BY THE MOTION CPU
Servo amplifier
Servomotor
Motion CPU
Motion SFC program No.15
(Program No. specified with the S(P).SFCS instruction.)
System settings
Fixed parameters
Servo parameters
Parameters block
Home position return data
JOG operation data
Limit switch output data
System data such as axis allocations
Fixed data by the mechanical system, etc.
Data by the specifications of the connected
servo amplifier
Data required for the acceleration, deceleration
of the positioning control, etc.
Data required for the home position return
Data required for the JOG operation
ON/OFF pattern data required for the limit
switch output function
Motion SFC program . . . . .
Positioning control parameters . . . . .
F10
K100
G100
START
END
G101
Create and correct using a
peripheral device
(Note-1)
Set and correct using a
peripheral device
(Note-1)
Once execution type operation control step
Command which performs numerical operation and
bit operation.
"WAIT"
Command which transits to the next step by
formation of transition condition Gn.
Motion control step
Command which performs starting of the servo
program "Kn", etc.
REMARK
(Note-1) : The following peripheral devices started by the SW6RN-GSV P can be
used.
• The personal computer by which WindowsNT
R
4.0/Windows
R
98/
Windows
R
2000/Windows
R
XP works. (IBM PC/AT compatible)
WindowsNT
R
, Windows
R
are either registered trademarks or trademarks of
Microsoft Corporation in the United States and/or other countries.